Die tatsächliche Lage sowie die Bewegung beliebiger Körper wird mittels eines optischen Positionserfassungssystems bestimmt. Auf Grundlage photogrammetrischer Verfahren wird die räumliche Anordnung von speziellen Markern auf einer Modelloberfläche erfasst. Deren Zuordnung zu einem CAD Modell des untersuchten Körpers ermöglicht die Synthetisierung der tatsächlichen Modellage und Modellbewegung.
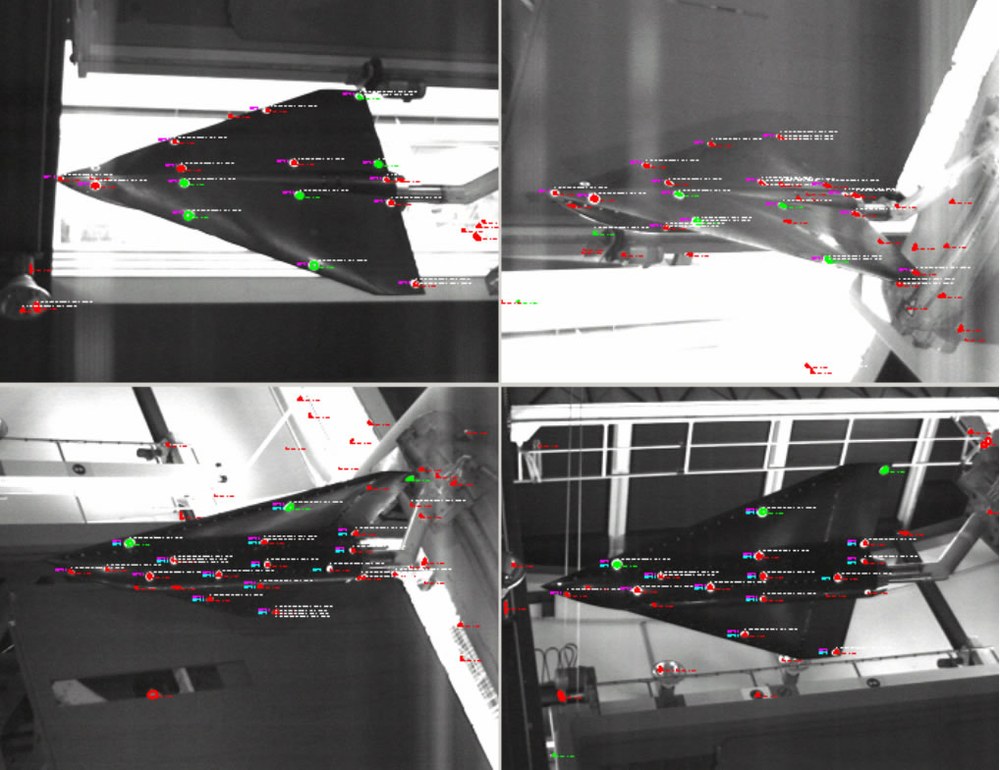
Zur Positionserfassung eines Windkanalmodells werden reflektierende Marker auf der Modelloberfläche angebracht. Deren räumliche Lage kann mittels optischer Triangulation bestimmt werden. Die Abbildung zeigt eine Anwendung des Messsystems bei der mit dem Einsatz mehrerer Kameras eine kontinuierliche Messung der Modellage währen 360° Rollmanövern ermöglicht wird.
Synthetisierung der Modellbewegung aus einem 360° Rollmanöver
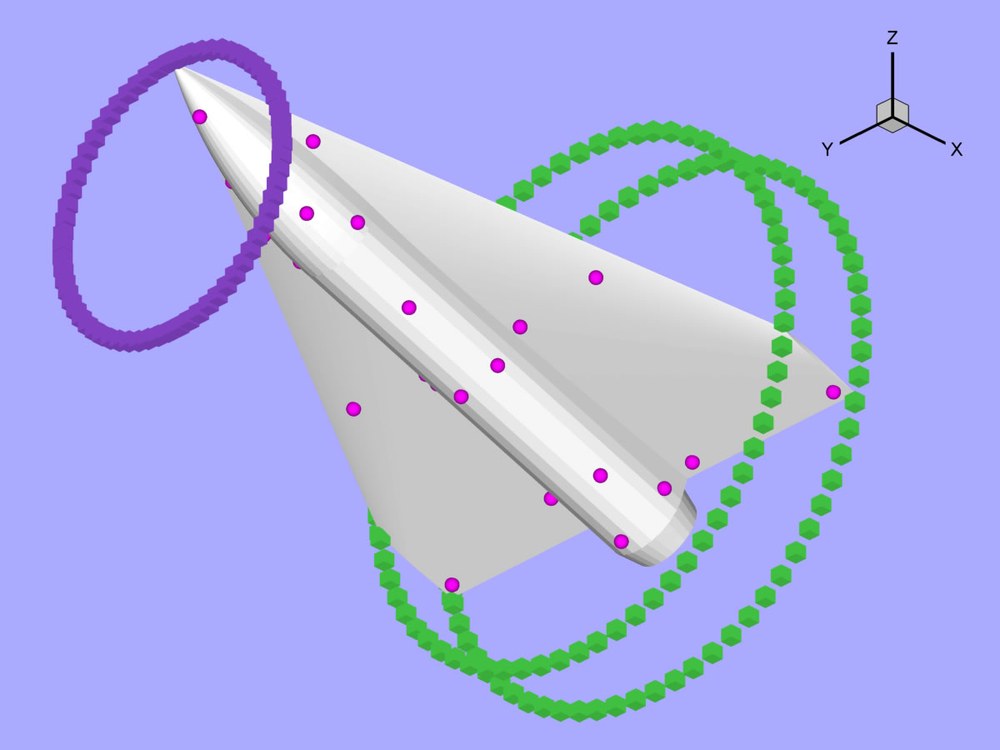
Zur Darstellung der gemessenen Modellposition in einem Rechnermodell werden die Positionsmarker an ein CAD-Oberflächennetz angepasst. Dieses ist in der Abbildung zusammen mit den Positionsmarkern auf der Modelloberfläche für einen nominellen Anstellwinkel von alpha="18°" und einen Rollwinkel von phi="0°" gezeigt. Im hier betrachteten Fall wurde das Modell auf einer Roll-Trudel-Derivativwaage mit nominell f=0.15 Hz gedreht, wobei die Bildaufnahmefrequenz des Positionserfassungssystems 20 Hz betrug. Das heißt, während eines Umlaufs wurden 67 Positionserfassungen mit einem Abstand von 5.4° im Rollwinkel durchgeführt. Die daraus ermittelten Trajektorien der Modellspitze sowie der Flügelkanten sind in der Abbildung für einen Umlauf dargestellt.