
ATON – Autonomous Terrain-Based Optical Navigation
Motivation
Zukünftige Explorationsmissionen benötigen fortgeschrittene Fähigkeiten wie die einer präzisen und sicheren Landung auf planetaren Körpern oder der Durchführung von Rendezvous und Docking-Operationen. Viele dieser Missionen werden sowohl in der Erd- und Mondumgebung stattfinden, als auch bei weit entfernten Zielen wie dem Mars oder den Eismonden von Jupiter und Saturn. Für eine zuverlässige Operation ist sowohl Autonomie des Raumfahrtzeuges nötig, als auch die Verwendung des Zielkörpers als Navigationsreferenz. Als vielversprechend für die Umsetzung dieses Konzepts gilt die Verwendung von Methoden und Technologien der optischen Navigation. Wenig überraschend muss für diese modernen Ansätze ein deutlich höherer Grad an Details über das Missionsziel an Bord verarbeitet werden. Diese stammen zum einen aus Daten aktueller Kartierungsmissionen, aus denen beispielsweise Kataloge mit georeferenzierten Landmarken abgeleitet werden können. Ergänzt werden solche a priori Informationen mit Messungen die im Verlauf der Mission gemacht werden, sie finden Anwendung z.B. für den Abgleich mit einem an Bord vorhandenen Landmarkenkatalog oder zur Beurteilung der Beschaffenheit des Landegebiets. Aus allen diesen Anwendungen ergibt sich der Bedarf nach deutlich verbesserter Rechenkapazität, nach neuartigen optischen Sensoren und nach komplexen Algorithmen zur Verarbeitung der durch sie gelieferten Daten.
Aus dieser Motivation heraus entwickelt die Abteilung Navigations- und Regelungssysteme des DLR-Instituts für Raumfahrtsysteme im Verbund mit anderen Instituten ein GNC-System, welches Inertialsensoren mit neuartigen Sensoren und Verfahren der optischen Navigation integriert. Aufbauend auf den vorhandenen Kompetenzen in den beteiligten Instituten soll ein Navigationssystem entwickelt werden, welches einem Landefahrzeug eine autonome, präzise und sichere Landung auf dem Mond ermöglicht.
Überblick
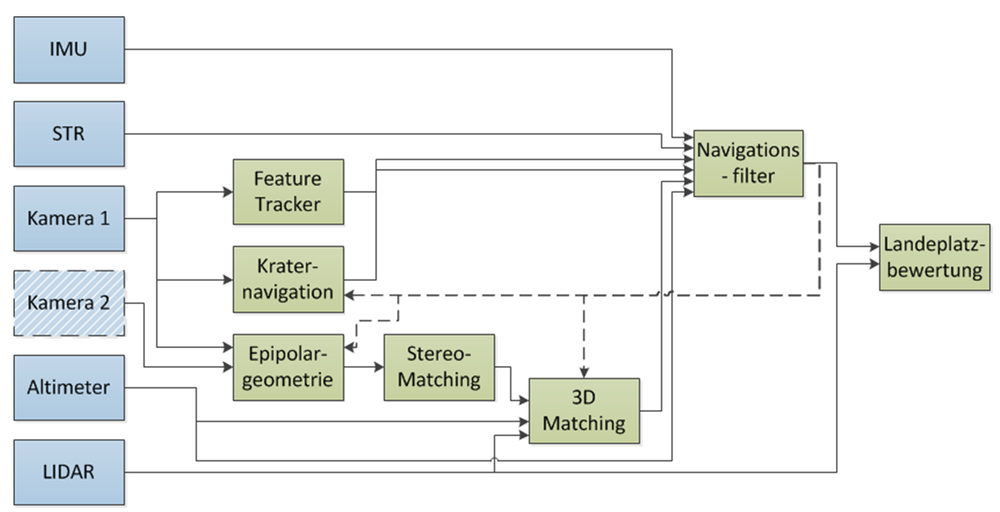
Die vom GNC-System verwendete Sensorik umfasst IMU, Star Tracker, Kamera(s), Altimeter und einen Flash Lidar. Die daraus entstehenden Sensordaten werden verarbeitet in Algorithmen wie Kraternavigation, Feature Tracking, oder Landeplatzbewertung, deren Ergebnisse dann zu einer umfassenden Zustandsschätzung fusioniert werden.

Projektziele:
- Implementierung der Navigationssoftware auf einem Echtzeitsystem
- Integration von IMU, Kameras und Laserscannern auf dem Echtzeitsystem
- Verifikation des GNC-Systems im geschlossenen Regelkreis („closed loop“) im Rahmen eines Helikopterflugs
- Miniaturisierung und Qualifizierung des Systems für Raumfahrtanwendung
Erreichte Meilensteine
- 2017 Closed-loop-Flugversuch einer Helikopterdrohne mit Flugführung und Regelung auf Basis der in Echtzeit an Bord berechneten ATON-Navigationslösung, mit Abfliegen einer Abstiegstrajektorie bis kurz vor die Landung
- 2016 Open-loop-Flugversuch zur Demonstration der Fähigkeit des integrierten ATON-Navigationsrechner- und Sensorsystems zur Berechnung einer Navigationslösung in Echtzeit
- 2015 Datenaufzeichnungsflug mit dem integrierten ATON-System
- 2013 Open- und Closed-loop-Tests der ATON-Navigationsalgorithmen im Labor TRON mit Bilddaten von Industriekameras und Geländemodellen
- 2012 Fertigstellung des echtzeitfähigen Navigationssoftware-Frameworks und Demonstration kritischer Funktionalität im Rahmen von Simulationskampagnen
- 2011 Fertigstellung der Simulationsumgebung zur Generierung von Trajektorien, Umgebungs- und Sensordaten für realistische Mondlande-Szenarios

Nächste Schritte
Nach erfolgreicher Demonstration der Funktionalität des integrierten Systems aus Sensorik und Navigationsrechner gilt es, die Algorithmen auf die Anforderungen von Flugsoftware hin zu optimieren und die Hardware in raumfahrtqualifizierbare Breadboards zu überführen.