
FOSTER²NAV
Einführung
Das Ziel des FOSTER²NAV-Projektes war die Entwicklung und der Test eines Flash Lidar-Sensors für den Einsatz in Explorationsmissionen. Ein solcher Sensor erzeugt direkt ein Tiefenbild. Ein bedeutender Unterschied zu einer auf zwei Kameras basierenden Stereokamera-Lösung ist ein wesentlich größerer Entfernungsbereich, über den dieser Sensor arbeiten kann. Typische Einsatzbereiche für einen raumfahrtauglichen Flash Lidar sind die Echtzeit-Bewertung von Landeplätzen sowie Rendezvous und Docking.
Das FOSTER²NAV-Projekt startete in 2010 und wurde 2014 erfolgreich beendet. Das Projekt wurde im Rahmen des FP7-Programms der EU realisiert. Die Projektpartner waren CSEM, VTT, Modulight und Airbus. Weiterführende Information befinden sich auf der offiziellen FOSTER²NAV Homepage.
Das DLR-Institut für Raumfahrtsysteme war für die Vorbereitung und Durchführung der dynamischen Tests verantwortlich. Das Ziel der Tests war die Verifikation der Funktion des Flash Lidar.
Test Vorbereitung
Der Flash Lidar wurde in drei Testanlagen mit komplementären Eigenschaften getestet. Übergreifend für alle Tests galt:
- Positionierung und Bewegung des Sensors relativ zu einem Testobjekt unter verschiedenen Bedingungen wie veränderlicher Geschwindigkeit, Entfernung und Testobjekt-Geometrie
- Aufnahme und Speicherung synchronisierter Sensor- und Referenzdaten während des Tests
- Analyse der Sensor- und Referenzdaten zur Verifikation der Funktion und zur Ermittlung der Leistungsfähigkeit
Die Hauptaktivitäten während der Vorbereitung waren:
- Entwurf der Testkampagnen und der Testprozeduren
- Definition eines Lasersicherheits-Konzepts
- Entwurf und Herstellung von Testobjekten mit unterschiedlicher Geometrie und verschiedenen Albedos
- Alignment zwischen Flash Lidar und den Laborkomponenten
Entwicklung von Prozeduren zur Erstellung von Referenzdaten
- für die Indoor-Tests: auf Grundlage von hochpräzisen Laser Tracker-Messungen
- für die Outdoor-Tests: Entwicklung eines GPS/IMU-basierten Navigationssystems unterstützt durch Messungen eines Tachymeters und einer GPS-Referenzstation
- Entwicklung eines Konzepts zur Synchronisierung der Sensordaten und der Referenzmessdaten
Indoor-Tests in TRON
Im Rahmen der Tests in TRON lag das Augenmerk auf der Aufnahme hochgenauer Referenzdaten (Ground Truth) in der Größenordnung von 1 mm. Zusammen mit den Messdaten konnte eine erste Charakterisierung des Sensors in Hinblick auf systematische Fehler und Rauschen vorgenommen werden.
Der Flash Lidar wurde in TRON unter folgenden Parametern getestet:
- Entfernung zum Testobjekt: 1 – 10 m
- Geschwindigkeit relativ zum Testobjekt: 0.2 m/s – 1.4 m/s in Schritten von 0.2 m/s
- Albedo des Testobjekts variiert mit schwarzem und weißem Stoff
- Geometrie des Testobjekts: Ebene Form und Primitive
Outdoor-Tests
Das Ziel der Außentests war die Durchführung von Tests mit höheren Geschwindigkeiten und größeren Entfernungen. Aufgrund der großen optischen Energien mit denen der Flash Lidar arbeitet, mussten weite Teile um das Testgebiet abgesperrt werden. Daher wurde der Militärflugplatz Fassberg ausgewählt.
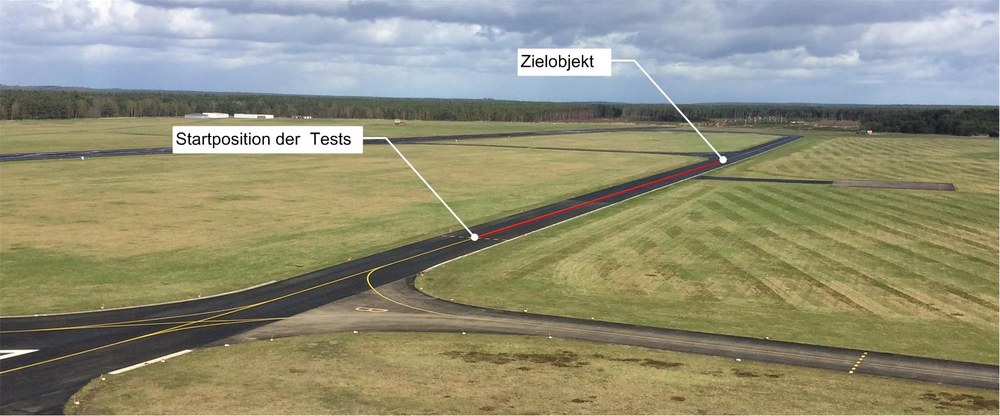

Als Zielobjekt diente eine 3 m x 3 m große Fläche, die ähnlich wie in TRON mit Stoff bespannt und mit Primitiven ausgestattet werden konnte. Der Flash Lidar wurde auf dem Dach eines Autos installiert, im Auto befanden sich ein Akkupack zur Stromversorgung und der Kontrollcomputer.
Auch für die Außentests wurden die Referenzdaten erstellt. Dazu wurde ein Navigationssystem entwickelt, und dessen mobiler Teil neben dem Flash Lidar auf dem Autodach installiert. Das Navigationssystem bestand aus:
mobiler Teil auf Autodach
- IMU
- GPS Empfänger
- Computer mit WLAN zum Austausch der GPS-Messungen beider Empfänger und Echtzeit-Berechnung einer relativen GPS-Lösung
stationärer Teil
- GPS Empfänger
- Computer mit WLAN zum Austausch der GPS-Messungen beider Empfänger
Der Flash Lidar wurde in Fassberg unter folgenden Parametern getestet:
- Entfernung zum Testobjekt: 10 m – 200 m
- Geschwindigkeit relativ zum Testobjekt: bis 23 m/s
- Albedo des Testobjekts: weißer Stoff
- Geometrie des Testobjekts: Ebenes Zielobjekt mit installierten Primitiven
