Die Forschungsgruppe Multisensorsysteme forscht an Themen und Verfahren, die eine robuste (störfeste) Bestimmung von Positions-, Navigations,- und Zeitdaten (PNT) an Bord von Schiffen ermöglichen. Die Navigationsdaten beinhalten hier neben der Geschwindigkeit (Geschwindigkeit über Grund / durch Wasser, Kurs über Grund) auch die dreidimensionale Schiffslage (roll, pitch, heading). Die Entwicklungen in der Arbeitsgruppe basieren auf dem Systemkonzept des maritimen PNT Systems. In diesem wird das bordseitige Element zur PNT Bestimmung in einem zukünftigen Integrierten Navigationssystem (INS) durch eine multisensorfusionsbasierte PNT-Unit (Datenprozessierungseinheit) realisiert.
Ziel ist es, durch eine kombinierte Nutzung aller bordseitigen Sensoren wie z.B. GNSS Receiver (multifrequency, multi constellation), Speed Log, Gyrokompass, Echolot und Inertialsensoren sowie die Nutzung von Ergänzungsdiensten (GBAS) und terrestrischen alternativen Positionsdiensten (R-Mode, e-Loran etc.) eine vollständige und zuverlässige Bereitstellung der PNT-Daten erreichen zu können. Weiterhin soll dem Nutzer eine auf einer Genauigkeitsschätzung basierende Integritätsinformation für alle PNT Parameter zur Verfügung gestellt werden. Wie man eine solche Genauigkeitsschätzung im Sinne der Bestimmung einer oberen Schranke unter Berücksichtigung des Restrisikos für die verschiedenen Sensoren und Sensorkombinationen erzielen kann, ist ein aktueller Forschungsgegenstand der Arbeitsgruppe. Basis hierfür ist die Entwicklung von Fehlermodellen für alle genutzten Sensoren.
Die Nutzung von Globalen Navigationssatellitensystemen (GNSS), wie die derzeit verfügbaren Systeme GPS (USA) und GLONASS (Russland) sowie die sich im Aufbau befindenden Systeme GALILEO (Europa) und BeiDou (China) ist derzeit und wird auch zukünftig eine wesentliche Komponente zur Bestimmung der schiffsseitigen PNT Daten sein. Deshalb ist die Entwicklung von Algorithmen und Verfahren zur GNSS-basierten Bestimmung der Position, Geschwindigkeit und Schiffslage (Orientierung) unter Ausnutzung der sich nun neu ergebenen Möglichkeiten zur Nutzung von mehreren Frequenzen und mehreren Systemen ein Schwerpunkt der Forschungsaktivitäten. Hierbei gilt es insbesondere spezielle, für die spezifische maritime Nutzung optimierte Integritätsmonitoring-Verfahren wie RAIM (engl. Receiver Autonomous Integrity Monitoring) zu entwickeln. In Zusammenarbeit mit der AG Maritime Dienste werden bordseitige Verfahren entwickelt, die die dort entwickelten Erweiterungen und Neuerungen landseitiger GNSS Ergänzungsdienste optimal nutzen.
Im Bereich der Sensorfusion werden zuverlässige rekursive Bayessche Filter entwickelt, welche GNSS und weitere schiffseitige Sensoren nutzen, um die Anforderungen für sicherheitskritische Anwendungen erfüllen zu können. Die Nutzung sogenannter eng gekoppelter (engl. tightly coupled) Filter ermöglicht es, innerhalb des Filters fehlerbehaftete Satellitensignale zu detektieren und von der Positionslösung auszuschließen.
Entwicklung von Fehlermodellen für bordseitige Sensoren
Entwicklung von robusten Bayesschen Filtern zur multisensorbasierten PNT Bestimmung
Entwicklung von multisensorbasierten Integritätsmonitoring Verfahren unter Nutzung von Bayesschen Filtern
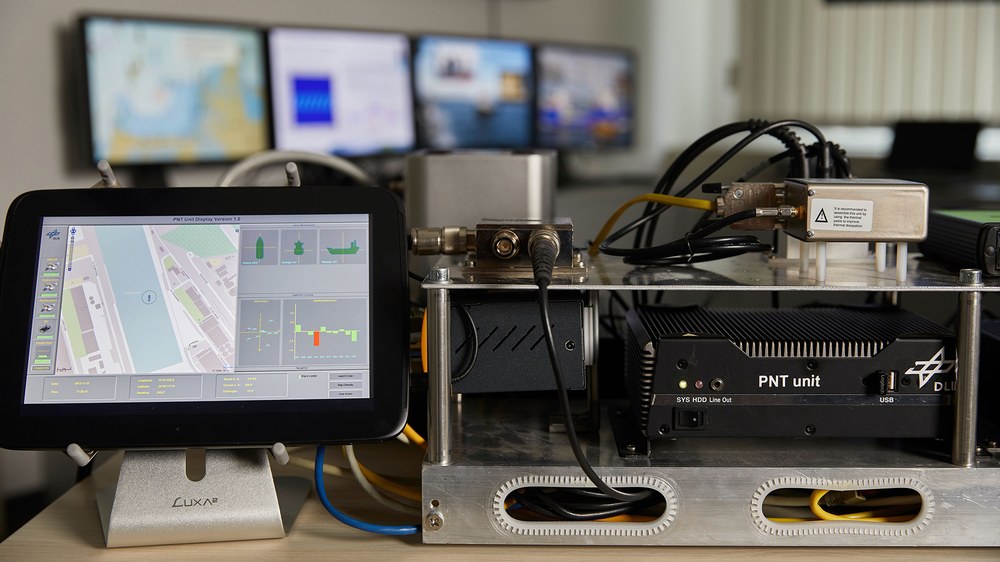
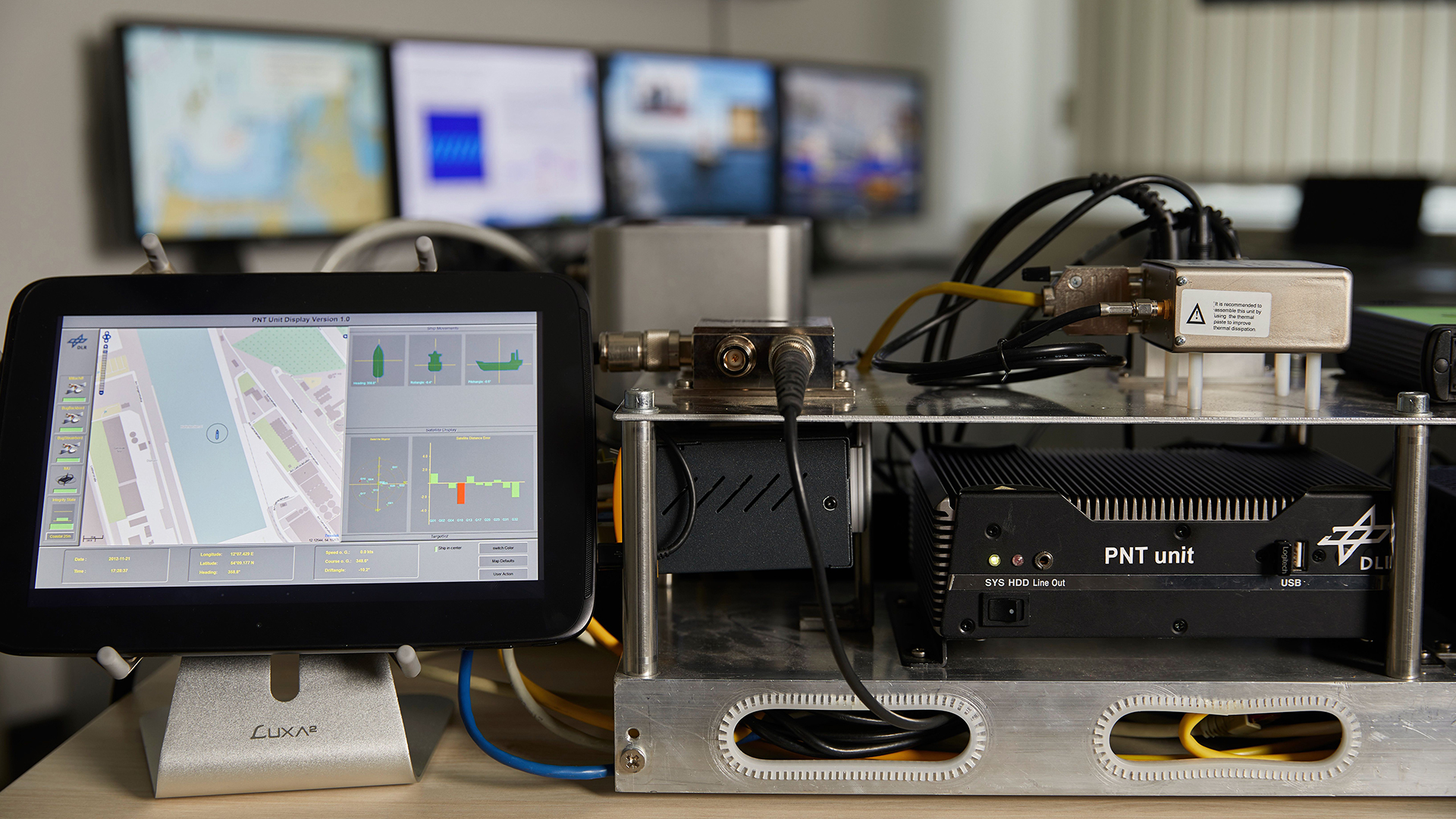
Weiterentwicklung der PNT-Unit V1
GNSS basierte bordseitige PNT Bestimmung
Entwicklung von multisystem- und multifrequenz- basierte Verfahren zur Bestimmung der Position und Geschwindigkeit
Entwicklung von GNSS Kompass Verfahren zur Bestimmung der Lagewinkel (roll, pitch, heading)
Entwicklung von Receiver autonomen Integritätsmonitoring (RAIM, ARAIM) Verfahren für maritime Anwendungen
Entwicklung von Verfahren der Position und Geschwindigkeit unter Verwendung von neuartigen Ergänzungsdiensten
Real Time (RT)-Framework
Bereitstellung einer gemeinsamen Softwareplattform zur Entwicklung und Validierung von multisensorbasierten Verfahren in einer Echtzeitprozessierung
Einbindung neuer Sensoren
Bereitstellung von Schnittstellen zum Nutzer und zur Visualisierung
Schiffsfahrt in Formation
Für eine Messkampagne des DLR-Instituts für Kommunikation und Navigation waren zwei Schiffe im Einsatz: Die "Neuwerk" des Wasser- und Schifffahrtsamts Cuxhaven sowie die "Hermann Marwede" der Deutschen Gesellschaft zur Rettung Schiffsbrüchiger. Die Wissenschaftler sendeten und empfangen von den Schiffen Signale im Breitbandbereich und untersuchten dabei die Einflüsse unter anderem von Wellen und Schiffskörpern auf die Übertragung.
Deutschlands lichtstärkster Leuchtturm wird zum Standort für die Signalübertragung zwischen Schiff und Land. Hoch über Helgoland installieren die DLR-Wissenschaftler ihre Antennen.
Routenbesprechung für die Messkampagne vor Helgoland
Für eine Messkampagne mit zwei Schiffen in der Nordsee hatten die Wissenschaftler des Deutschen Zentrums für Luft- und Raumfahrt (DLR) verschiedene Szenarien entworfen, die zwei Schiffen bei hohem Wellengang vor Helgoland abfahren sollten. Dabei wurde der Übertragungskanal im Breitbandbereich untersucht.







{kind=link}
{kind=link}
{kind=link}
{kind=link}