
GNSS Navigation Systems for Ballistic Vehicles
Sounding Rockets


Sounding Rockets take their name from the nautical term to sound which means to take measurements. They are basically comprised of a solid fuel rocket motor and the payload. The payload is the section which carries the instruments to perform the experiment and to send data back to Earth. After burn-out and separation from the motor the payload follows a parabolic trajectory with flight times of less than 30 minutes. When the experiments are completed, the payload re-enters the atmosphere and a parachute is deployed, bringing the payload gently back to Earth. The payload is then retrieved for experiment recovery and subsequent refurbishment. While sounding rockets make up a small fraction of the European space programs, only, they provide an essential complement and supplement to other research opportunities. By their nature, sounding rockets can access altitudes that are neither reachable by airplanes and balloons on one side nor by orbiting satellites on the other side. Within a range of 30 km and 250 km, in-situ measurements of the atmosphere are almost exclusively obtained by sounding rocket probes. While the duration of individual experiments is limited by typical flight times of 5 to 15 minutes, sounding rockets provide a high flexibility and affordable mission cost. Experiments can be scheduled on short notice, which is likewise important for the various kinds of solar and astrophysical observations conducted on sounding rockets. Last but not least, sounding rockets provide an established platform for biological, physical and technological experiments in weightlessness, which is well accepted even in the age of the manned space stations.
Within the European micro-gravity programs, sounding rocket launches are routinely performed in northern Sweden from the Kiruna launch site. Common systems include the dual stage Skylark 7 rocket flown in the Texus and Maser missions with a peak altitude of 250 km as well as the more powerful Maxus/Castor-4B rocket that is capable of carrying an 800 kg payload up to an altitude of 700 km. In addition to these, a variety of other motors (Viper, Orion, Nike, Super Loki) are employed in atmospheric and astrophysical research projects conducted for European scientists from launch sites in Europe, America and Australia and Antarctica.
GPS Applications
- Range Safety: During the boosted ascent trajectory, the GPS position and velocity measurements allow for a rapid recognition of guidance errors and real-time prediction of the instantaneous impact point (IIP). Based on this information, the range safety officer may decide on the need and feasibility of an abnormal flight termination.
- Geolocation and time tagging: absolute position and timing data collected jointly with the science measurements are essential for the study of regional and temporal variations in the atmosphere and magnetosphere and a comparison with experiments performed at other sites. In case of multiple payloads separated during the mission or flown simultaneously on different rockets, GPS can provide highly accurate relative state vectors and timing information for the science data synchronization.
- Event triggering: using absolute time and position data, experiments and service systems may precisely be activated at the desirable flight stage. A GPS receiver may thus take over functions traditionally performed by mechanical timers and barometric switches.
- Recovery: during the final descent and parachute phase a GPS receiver can continuously relay the instantaneous payload position to the control center to allow a rapid and reliable recovery even in the presence of pronounced wind fields.
- Performance and trajectory analysis: the position and velocity measurements of a GPS receiver can be used to compare the actual performance of a boost motor with pre-mission models and to infer the aerodynamic properties of the rocket. This enables a refined planning of future missions based on improved parameter sets.
Instantaneous Impact Point Prediction
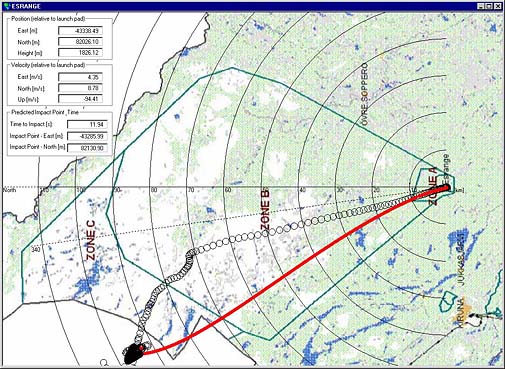
The instantaneous impact point (IIP) describes the touch-down point of a sounding rocket under the assumption of an immediate end of the propelled flight. It is representative of a situation in which the rocket motor is instantaneously switched off by the mission control centre following e.g. a guidance error during the boost phase. As part of the range safety operations during a sounding rocket launch, a real-time prediction of the IIP is performed to monitor the expected touch down point in case of a boost termination. The computation and display of the IIP allows the range safety officer to discern whether the rocket would eventually land outside the permissible range area and thus necessitate an abort of the boosted flight or even a destruction of the malfunctioning vehicle.
Supplementary to traditional radar tracking, the IIP prediction is nowadays based on GPS navigation data, which offer an inherently higher accuracy and reduced data noise. Following successful application in a variety of sounding rocket flights, GPS has therefore been recommended as the baseline for range safety tracking systems both for cost and performance reasons and is expected to provide the primary sensor for flight terminations systems in the near future.
To comply with the increased tracking performance, the accuracy of existing IIP prediction algorithms has been assessed and a simple, yet accurate, analytical IIP prediction method for real-time applications has been developed. The model is based on a plane-Earth parabolic trajectory model with first order corrections for surface curvature, gravity variation and Earth rotation. Despite the implied simplifications the resulting model is more complete and of higher accuracy than conventional IIP algorithms based on a flat Earth approximation with Coriolis correction. Overall the agreement with the full modelling of conservative forces is high enough to introduce IIP prediction errors of less than 1.5% of the ground range for sounding rockets reaching altitudes of up to 700 km and flight times of about 15 min. On the other hand the model is less complex than a perturbed Keplerian trajectory model or numerical integration and thus well suitable for real-time computations. Following its ground based validation, the model has successfully been incorporated into the Phoenix-HD GPS receiver for high dynamics applications, which can thus directly generate range safety related information onboard a sounding rocket.
Despite these encouraging developments, the IIP prediction still suffers from an insufficient modeling of atmospheric flight phases which poses the most sever constraints to the achievable accuracy. While a limited progress has been made to describe the IIP shift caused by drag during the ascent trajectory, the ballistic coefficient of a rocket after a destruction or malfunction remains essentially unknown.
Further Reading
Montenbruck O., Markgraf M., Turner P., Engler W., Schmitt G.;
GPS Tracking of Sounding Rockets - A European Perspective;
NAVITECH'2001, 10-12 Dec. 2001, Noordwijk (2001).
Montenbruck O., Markgraf M., Jung W., Bull B., Engler W.;
GPS Based Prediction of the Instantaneous Impact Point for Sounding Rockets;
Aerospace Science and Technology 6, 283-294 (2002).
Montenbruck O., Markgraf M.;
Test Procedures for Instantaneous Impact Point Prediction;
GTN-TST-0010; Issue 1.0, DLR/GSOC (2002).
Markgraf M., Montenbruck O., Turner P., Viertotak M.;
Instantaneous Impact Point Prediction for Sounding Rockets - Perspectives and Limitations;
16th Symposium on European Rocket and Balloon Programmes and Related Research, June 2-5, 2003, St.Gallen (2003).
Montenbruck O., Markgraf M.;
A GPS Tracking System with Onboard IIP Prediction for Sounding Rockets;
AIAA Guidance, Navigation and Control Conference, Aug 11-14, 2003, Austion, Texas (2003).
Markgraf M., Montenbruck O.,
Phoenix-HD - A Miniature GPS Tracking System for Commercial and Scientific Rocket Launches;
6th International Symposium on Launcher Technologies, 8-11 Nov. 2005, Munich Germany (2005).