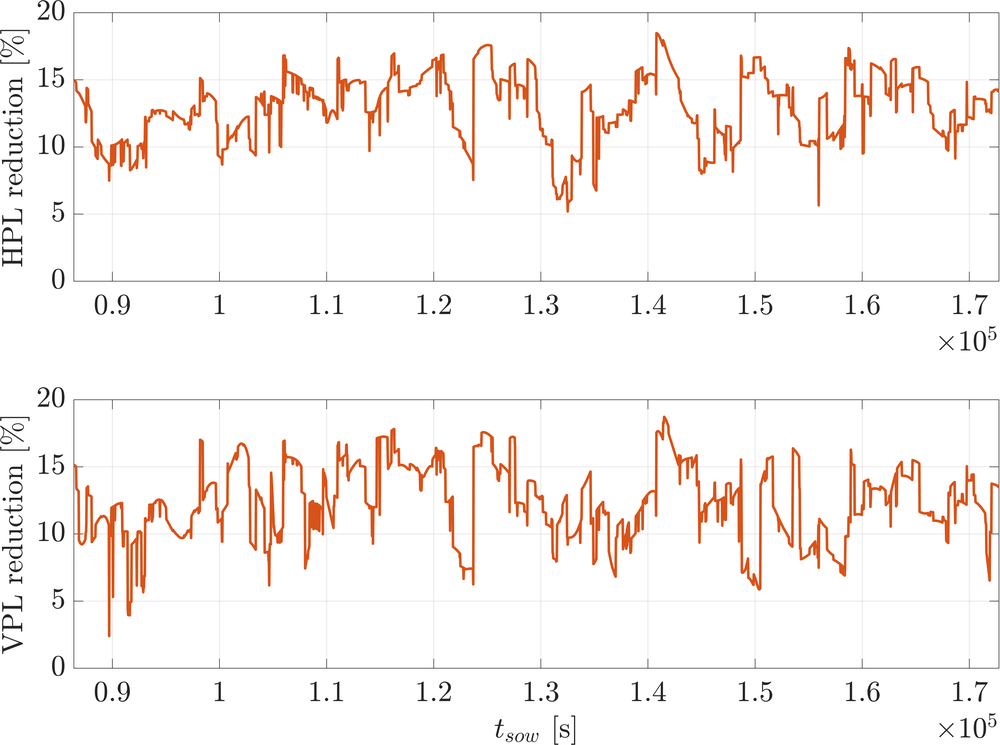
At DLR, it is being explored the possibility of exploit Galileo High Accuracy Service (HAS) corrections for GNSS orbits and clocks within the Advanced Receiver Autonomous Integrity Monitoring (ARAIM) algorithm. The objective is to enhance availability of the system under strict navigation requirements such as those characterizing vertical guidance on terminal flight phases.
Currently, ARAIM performance is in part limited by the Signal-In-Space error (SISE) characteristics of Galileo and GPS constellations, which constraints the achievable protection levels.
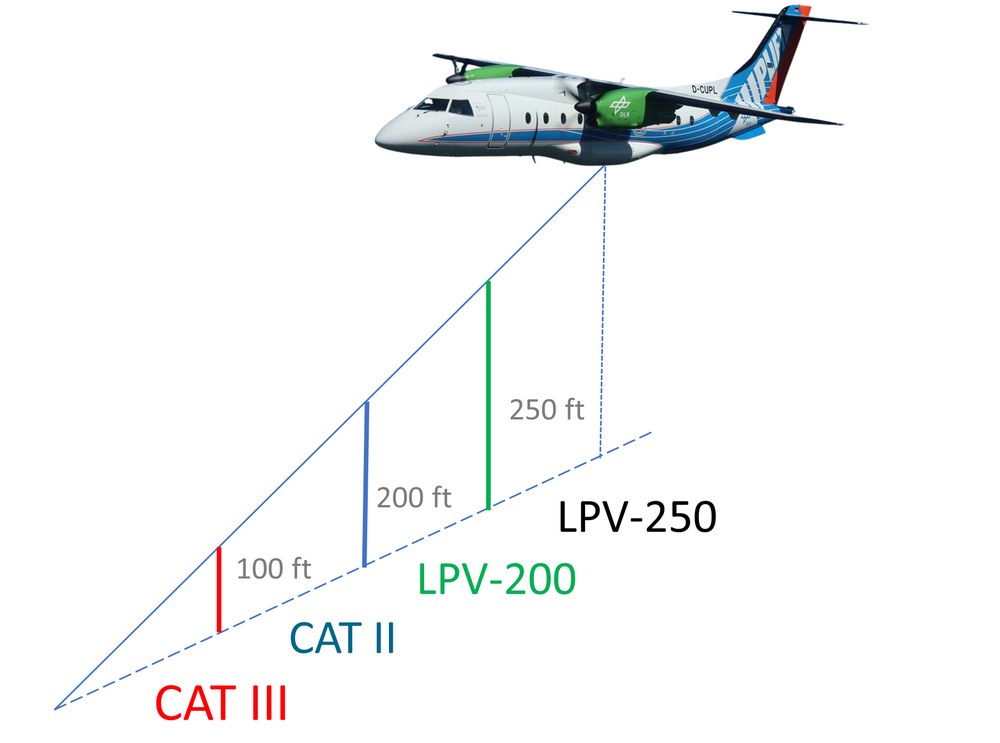
ARAIM plans to support operations up to LPV-200 in the future.
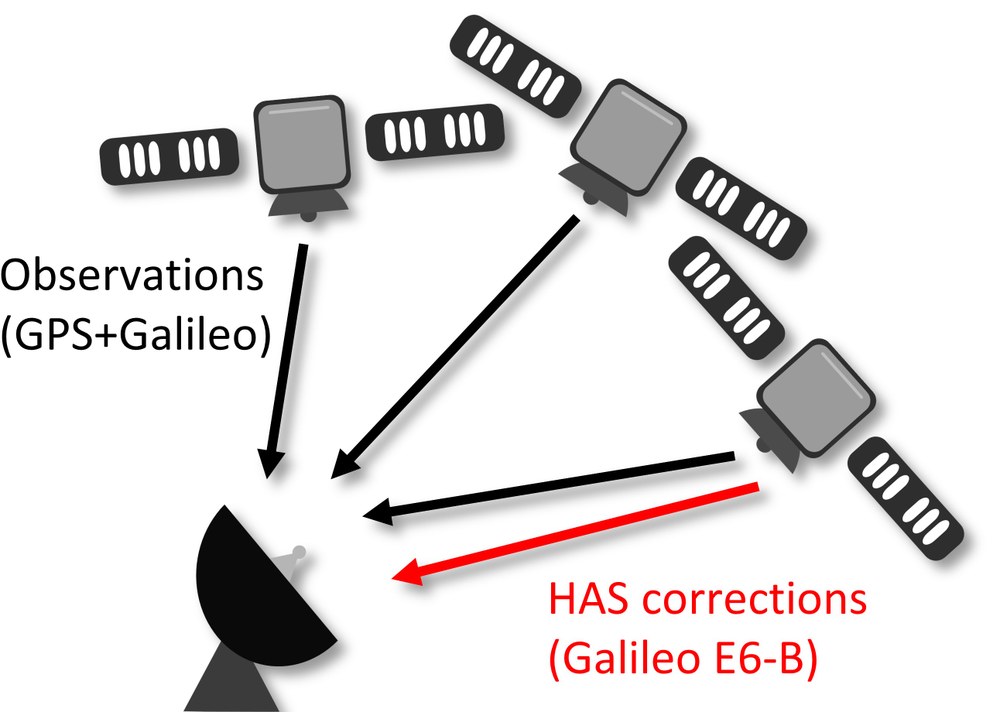
Galileo HAS provides corrections for orbit, clocks as well as clock biases with global coverage.
HAS corrections are disseminated through Galileo E6-B band to the users. This allows users with a HAS-enabled receiver to retrieve the correction products globally without the need of any additional infrastructure.
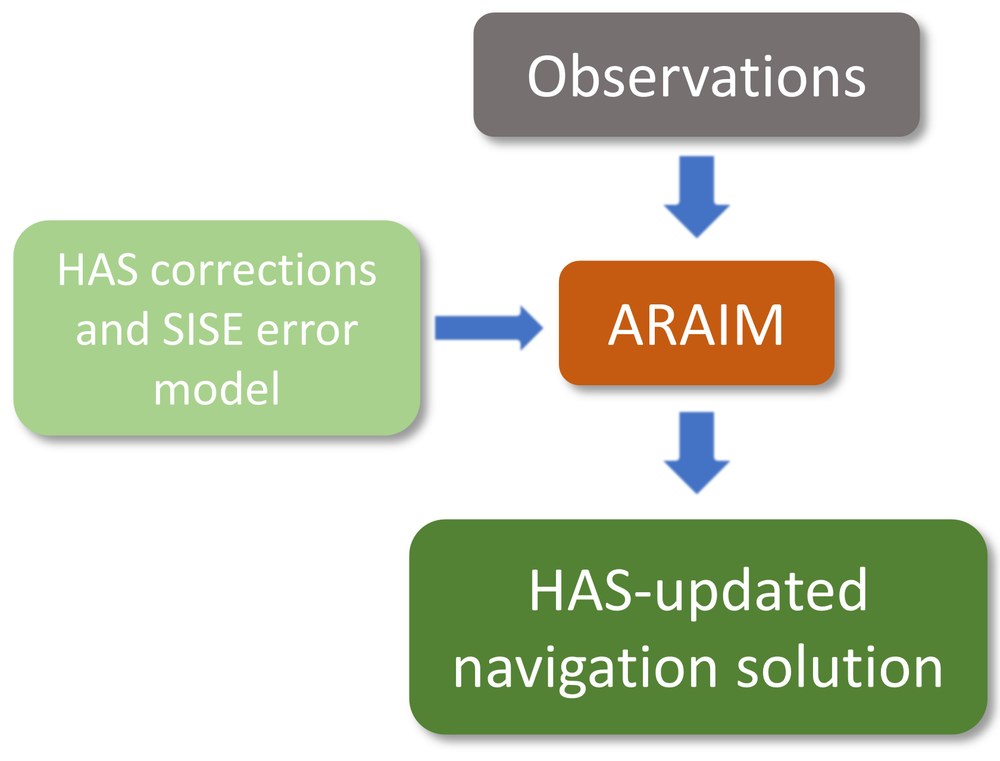
The Galileo High Accuracy Service (HAS) is integrated within ARAIM, enhancing accuracy and availability of the navigation solution by exploiting the broadcast orbit and clock corrections for GPS and Galileo constellations.
Joaquin G. López-Cepero et al. Advanced RAIM with Galileo HAS: Integration proposal and expected performance. (Unpublished)
DLR is working on the development of new quantum-based inertial sensing based on Optomechanical Acceleration Sensing (OMAS, 1st Quantum generation) and Cold-Atom Interferometry (CAI, 2nd Quantum generation) technologies.
New inertial sensors providing lower noise and low or zero drift performance. Hence, they can potentially enhance or extend the benefits and usage of current inertial sensors for different applications.
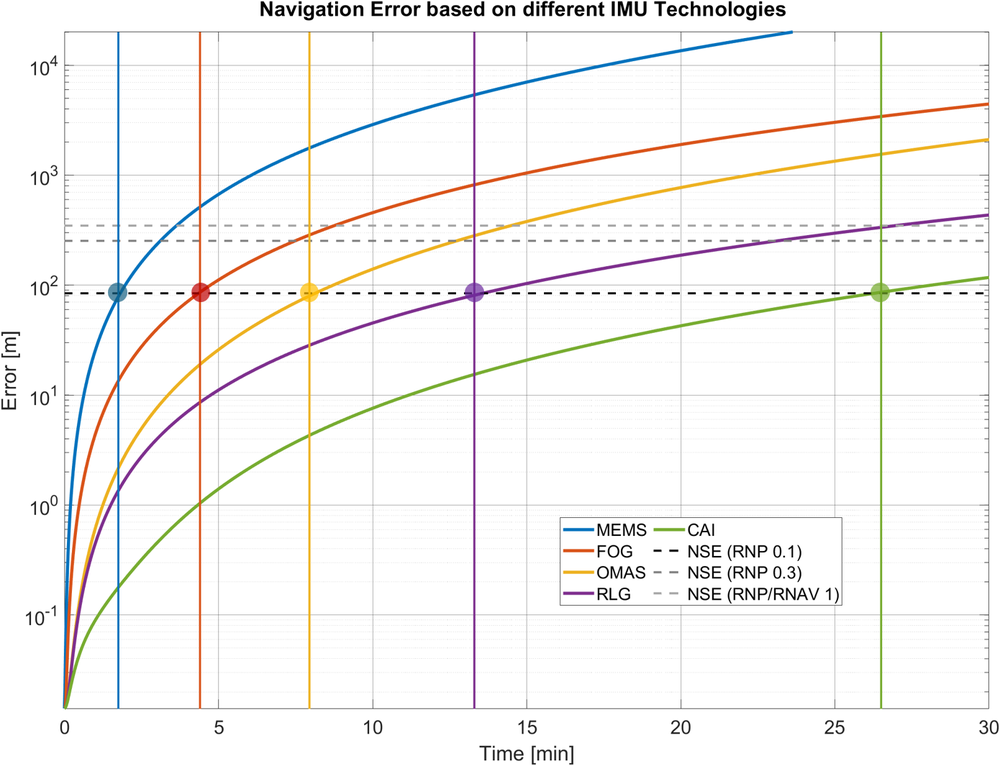
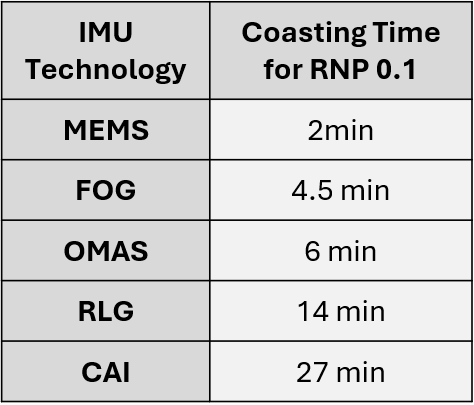
Evaluations of the predictive performance of inertial sensors compared to aviation operations
Although better inertial sensor can enhance robustness, resilient and increase the GNSS-independent coasting times, because of the necessity to compensate for Earth effects (such as gravity) to translate specific forces to linear accelerations, the standalone capability of a sole quantum inertial navigation system (strapdown) is still bounded as seen from the figure below.