
Navigation UAV, Multi-sensor and Integrity


Barometric Vertical Navigation in Urban Air Mobility and Vertiport Contexts
Motivation
Urban Air Mobility (UAM) intends to provide high‑frequency, low‑altitude transport services (air‑taxis, delivery UAVs, etc.) within densely built‑up environments. The safety of such operations hinges on the availability of a precise and reliable vertical navigation solution during the most critical phases of flight, i.e. vertical take‑off and landing (VTOL) operations and the subsequent low‑altitude manoeuvres in the vicinity of vertiports.
In dense city environments the Global Navigation Satellite System (GNSS) that underpins most current navigation solutions is subject to several well‑documented limitations. Due to the urban environment, multi-path and signal interference GNSS solution can suffer in vertical accuracy, availability, and integrity. A complementary, highly available source of altitude information that is independent of GNSS is therefore required
Ground-Augmented Barometric System for Vertiport Operation
Barometric altimeters determine altitude by measuring the ambient atmospheric pressure, a principle that is inherently independent of GNSS and immune to radio‑frequency interference. The low mass, modest cost, and ease of integration of barometric sensors make them an attractive, highly scalable solution for any Urban Air Mobility (UAM) platform.
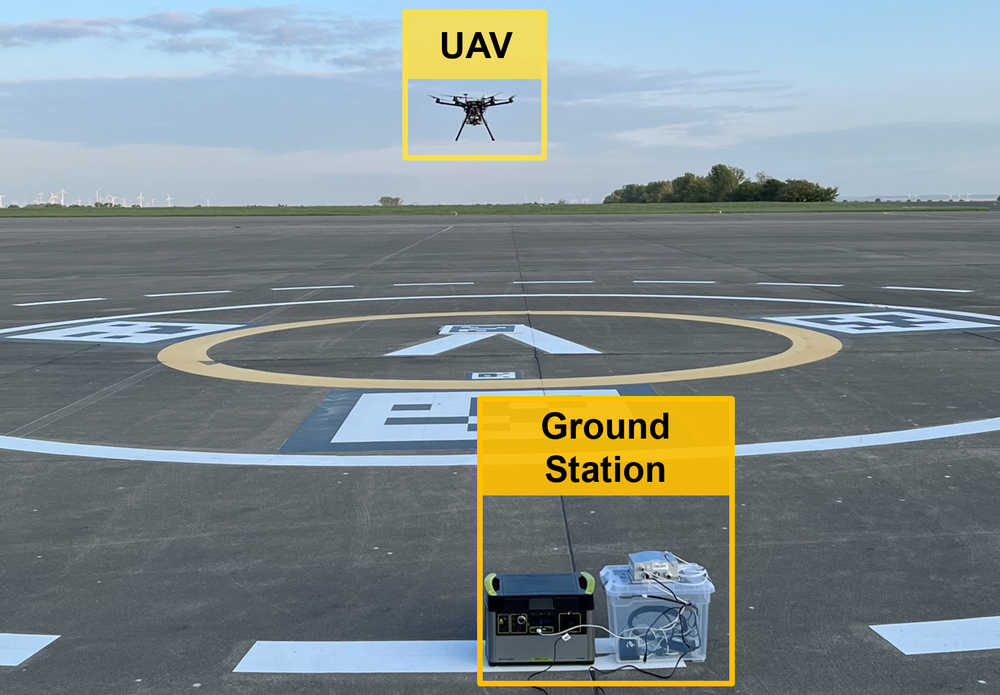
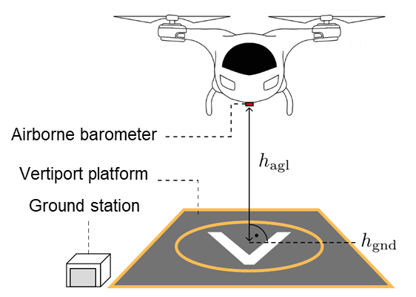
The German Aerospace Center (DLR) is actively researching the use of barometric sensors as a dedicated vertical navigation aid for Urban Air Mobility (UAM) at vertiports. The system consists of a ground station at the vertiport and an airborne barometer. By fusing ground‑based reference data with onboard pressure measurements, the system can deliver precise altitude information even when GNSS signals are unavailable or degraded. This approach promises to bridge critical flight phases in GNSS‑denied airspace.
Methodology
The ground station continuously provides local air pressure and temperature, timestamps the data and transmits it in real time to air vehicles in the vicinity of the vertiport.
The airborne system compares its own pressure readings with the ground reference, applies a Kalman filter to bound measurement uncertainties, and converts the resulting geopotential height into a geodetic altitude.
This way, the ground‑augmented barometric vertical navigation system provides a GNSS‑independent, highly available vertical reference. It also facilitates the harmonization of altitudes and establishment a common altitude reference system (CARS).
Related Publications
- M. Simonetti and O. G. Crespillo, “Robust Modeling of Geodetic Altitude from Barometric Altimeter and Weather Data,” in ION GNSS+, The International Technical Meeting of the Satellite Division of The Institute of Navigation, ser. GNSS 2021. Institute of Navigation, Oct. 2021.
- S. Heilein and O. G. Crespillo, “Ground-Corrected Barometric Vertical Navigation System for Vertiport Operations,” in 2024 AIAA DATC/IEEE43rd Digital Avionics Systems Conference (DASC), 2024, pp. 1–10.
- O. G. Crespillo, C. Zhu, M. Simonetti et al., “Vertiport navigation requirements and multisensor architecture considerations for urban air mobility,” CEAS Aeronautical Journal, Jul. 2024.
- M. Simonetti and O. G. Crespillo, “Geodetic altitude from barometer and weather data for GNSS integrity monitoring in aviation,” NAVIGATION: Journal of the Institute of Navigation, vol. 71, no. 2, 2024.
Evaluation of Real Time Kinematic (RTK) Integrity Monitoring with Ambiguity Resolution
Context
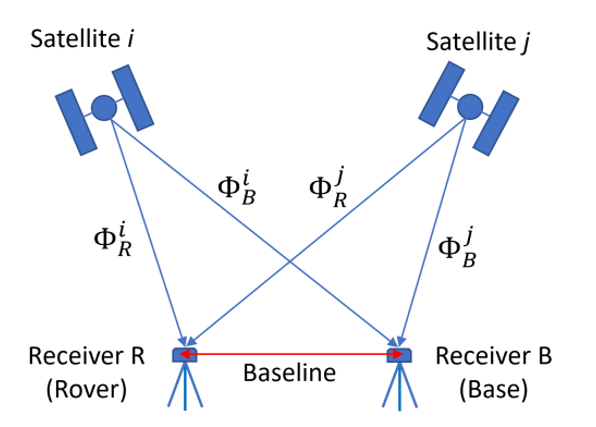
Currently, RTK provides high accuracy but there is no standardized approach to guarantee its integrity in the case of fixed ambiguities.
Recent developments at DLR have investigated the option to use Multi-Hypothesis Solution Separation (MHSS) algorithm (well-known in the field of Advanced Receiver Autonomous Integrity Monitoring, ARAIM) to account for the probability of wrong ambiguity fixing
Algorithm
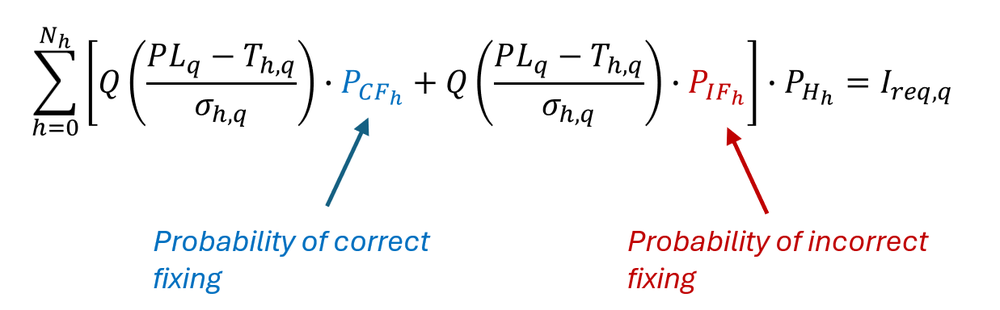
MHSS protection level equation can be modified to account for the exclusive situation of correct and incorrect fixing:
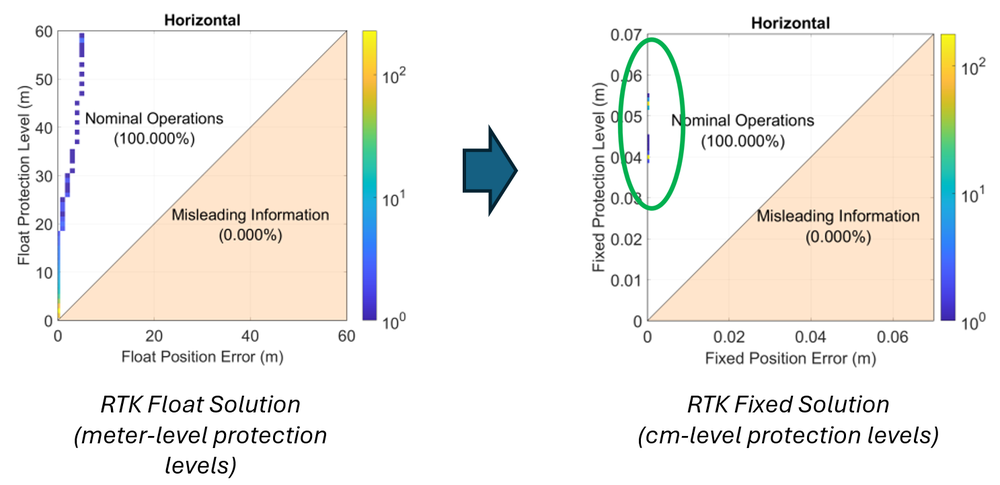
Results
Initial developments and evaluations of this algorithm with zero-baseline experiments are very promising in terms of the achievable small protection levels as seen in the figures below.
Contact: Omar Garcia Crespillo, omar.garciacrespillo@dlr.de