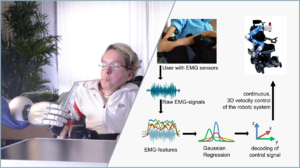
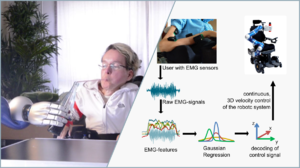
Various input devices are available for our robotic system EDAN. For people with severe muscular atrophy, the use of a joystick is often no longer an option due to a lack of motor functions. An interface based on the detection of muscle activation can be an alternative here. To realize this interface, residual muscle activity is measured by electromyography (EMG) through non-invasive EMG sensors on the skin. Using machine learning methods, the muscle activity thus recorded is translated into control signals for the robot, essentially replicating the functionality of a joystick. This interface has already been successfully tested in a pilot study with two paralyzed subjects suffering from spinal muscular atrophy (SMA).


{kind=link}