ROTEX (1988–1993)
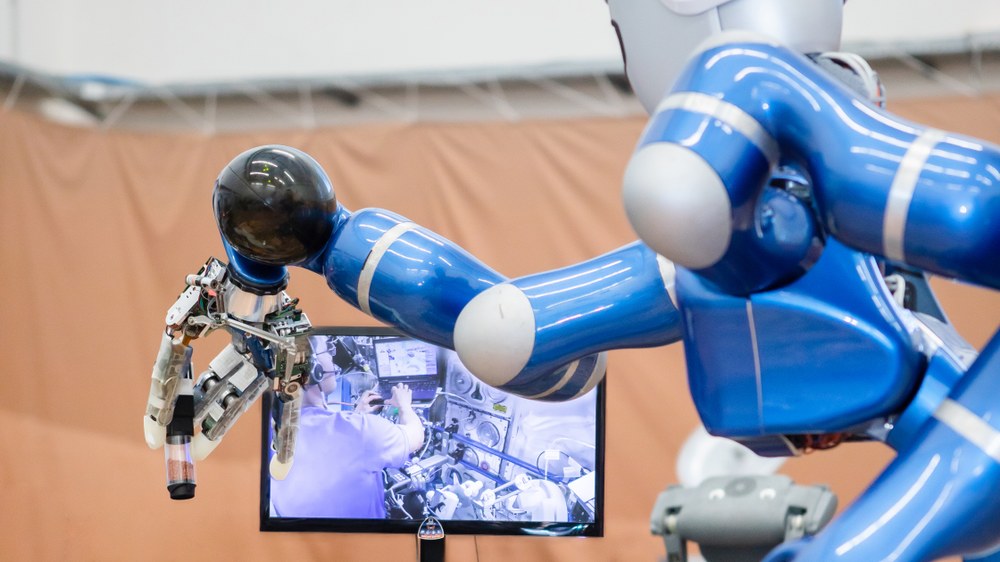
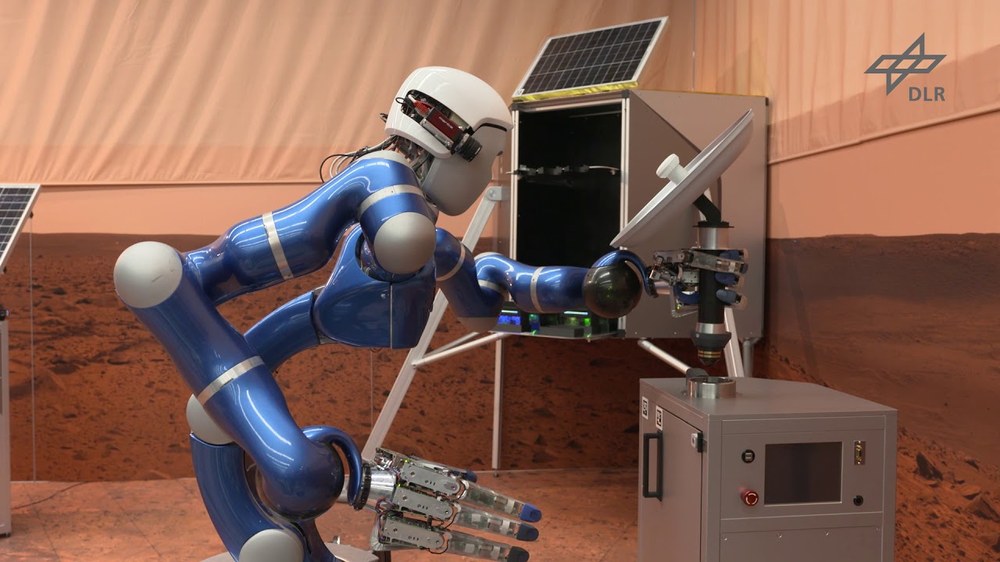
ROTEX (Robot Technology Experiment on Spacelab D2-Mission) was kind of a starting shot for Germany’s participation in space automation and robotics. It contained as much sensor-based on-board autonomy as possible, but on the other side it presumed that for many years cooperation between man and machine, based on powerful telerobotic structures, will be the foundation of high-performance space robot systems, operable especially from ground.






{kind=link}