Skip to main content
Skip to navigation
Skip to footer
DLR Portal
Press
Accessibility
de
en
Institute of Robotics
and Mechatronics
About us
About us
▾
Institute of Robotics and Mechatronics
▾
History of the institute
▾
Laboratories and infrastructure
▾
Director of the Institute
▾
Departments
▾
Mechatronic Systems
▾
Analysis and Control of Advanced Robotic Systems
▾
Autonomy and Teleoperation
▾
Perception and Cognition
▾
Cognitive Robotics
▾
Institute Development and Central Management
▾
Contact persons
▾
Location
Research
Research
▾
Robotic systems
▾
Aerial robots
▾
Arms
▾
Hands and grippers
▾
Humanoids
▾
Legged
▾
Multi-arm systems
▾
Mobile Platforms
▾
Human-Machine Interfaces
▾
System components
▾
Scanners
▾
Applications
▾
Space Assistance
▾
Orbital Robotics
▾
Planetary Exploration Robotics
▾
Future Manufacturing
▾
Terrestrial Assistance
▾
Field Robotics
▾
Expertise
▾
Autonomy
▾
3D Perception
▾
Feedback control
▾
Modelling
▾
Telepresence & VR
▾
Terramechanics
▾
Heritage
▾
Projects & missions
▾
Current projects
▾
Completed Projects
▾
Publications
▾
Papers
▾
Software
▾
Scientific Datasets
Innovation & Transfer
Innovation & Transfer
▾
Success stories
▾
Sensodrive
▾
Roboception
▾
MIRO Innovation Lab
▾
Hugo: Space technology for the operating theatre
▾
Spin-offs
▾
3D-Input
▾
Agile Robots
▾
Blickfeld
▾
Elektra Solar
▾
Kastanienbaum
▾
Kinetik Space
▾
Kinfinity
▾
Leverage Robotics
▾
Roboception
▾
RoboDrive
▾
Sensodrive
▾
Tacterion
▾
Tilo Wüsthoff Industrial Design
▾
Wessling Robotics
▾
Versatile Robotics
Latest
Latest
▾
News
▾
2026
▾
2025
▾
2024
▾
2023
▾
2022
▾
2021
▾
Press review
Multimedia
Multimedia
▾
Images
▾
Videos
▾
Brochures
▾
360 degree tour
Career & Education
Career & Education
▾
Vacancies
▾
Student jobs
>
Career & Education
>
Student jobs
Home
>
Career & Education
>
Student jobs
Student jobs
Master Thesis - AI-based 2D Pixel-wise Tracking for Space Applications
Working Student (m/f/d) - Computer Vision & Robotics Infrastructure
Master’s Thesis: Robust Multi-modal Place Recognition for Unstructured Environments via Geometric Priors
Master’s Thesis Offer: Conservative Reachability Analysis for Uncertain Attitude Dynamics on SO(3)
Master's Thesis: Investigating LLM- and RAG-Based Support for FMECA Creation in Robotic Systems
Working Student - User Interfaces for (Space) Robot Teleoperation
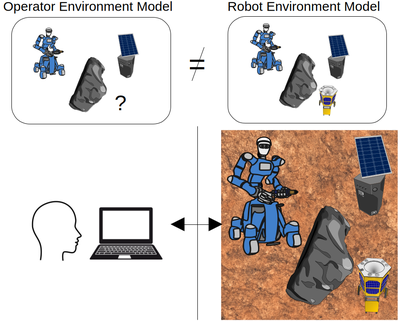
Master’s Thesis – Aligning Human‑Robot Environment Models for (Space) Robot Teleoperation
Master student in robotics, computer science or computer graphics (f/m/x): Global Indoor Localization & Mapping with LiDAR-Inertial systems