Hauptinhalt überspringen
Navigation überspringen
Footer überspringen
DLR Portal
Presse
Barrierefreiheit
de
en
Institut für Robotik
und Mechatronik
Über uns
Über uns
▾
Das Institut für Robotik und Mechatronik
▾
Geschichte des Instituts
▾
Labore und Forschungsanlagen
▾
Institutsleitung
▾
Abteilungen
▾
Mechatronische Systeme
▾
Analyse und Regelung komplexer Robotersysteme
▾
Autonomie und Fernprogrammierung
▾
Perzeption und Kognition
▾
Kognitive Robotik
▾
Institutsentwicklung und Zentrale Aufgaben
▾
Ansprechpersonen
▾
Standort & Anreise
Forschung
Forschung
▾
Robotersysteme
▾
Arme
▾
Flugroboter
▾
Hände und Greifer
▾
Humanoide
▾
Laufroboter
▾
Mehrarmige Systeme
▾
Mobile Plattformen
▾
Mensch-Maschine-Schnittstellen
▾
Systemkomponenten
▾
Scanner
▾
Anwendungsfelder
▾
Raumfahrtassistenzrobotik
▾
Orbitale Robotik
▾
Planetare Explorationsrobotik
▾
Produktion der Zukunft
▾
Terrestrische Assistenz
▾
Geländerobotik
▾
Expertise
▾
Autonomie
▾
3D-Wahrnehmung
▾
Regelung
▾
Modellierung
▾
Telepräsenz und VR
▾
Terramechanik
▾
Archiv
▾
Projekte & Missionen
▾
Laufende Projekte
▾
Abgeschlossene Projekte
▾
Wissenschaftliche Publikationen
▾
Literatur
▾
Software
▾
Datensätze
Innovation & Transfer
Innovation & Transfer
▾
Erfolgsgeschichten
▾
Sensodrive
▾
Roboception
▾
Hugo: Weltraumtechnologie für den OP
▾
MIRO Innovation Lab
▾
Ausgründungen
▾
3D-Input
▾
Agile Robots
▾
Blickfeld
▾
Elektra Solar
▾
Kastanienbaum
▾
Kinetik Space
▾
Kinfinity
▾
Roboception
▾
RoboDrive
▾
Sensodrive
▾
tacterion
▾
Tilo Wüsthoff Industrial Design
▾
Wessling Robotics
▾
Versatile Robotics
Aktuelles
Aktuelles
▾
Nachrichten
▾
2026
▾
2025
▾
2024
▾
2023
▾
2022
▾
2021
▾
Archiv
▾
Pressespiegel
Medien
Medien
▾
Bilder
▾
Videos
▾
Broschüren
▾
360-Grad-Tour
Karriere & Nachwuchs
Karriere & Nachwuchs
▾
Stellenangebote am Institut
▾
Informationen für Studierende
>
Karriere & Nachwuchs
>
Informationen für Studierende
Startseite
>
Karriere & Nachwuchs
>
Informationen für Studierende
Informationen für Studierende
Angebote für Masterarbeiten, Bachelorarbeiten, Praktika, Werkstudium
Master Thesis - AI-based 2D Pixel-wise Tracking for Space Applications
Working Student (m/f/d) - Computer Vision & Robotics Infrastructure
Master’s Thesis: Robust Multi-modal Place Recognition for Unstructured Environments via Geometric Priors
Master’s Thesis Offer: Conservative Reachability Analysis for Uncertain Attitude Dynamics on SO(3)
Master's Thesis: Investigating LLM- and RAG-Based Support for FMECA Creation in Robotic Systems
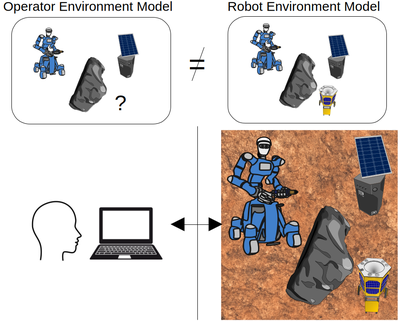
Master’s Thesis – Aligning Human‑Robot Environment Models for (Space) Robot Teleoperation
Working Student - User Interfaces for (Space) Robot Teleoperation