
Master’s Thesis – Aligning Human‑Robot Environment Models for (Space) Robot Teleoperation
What to expect:
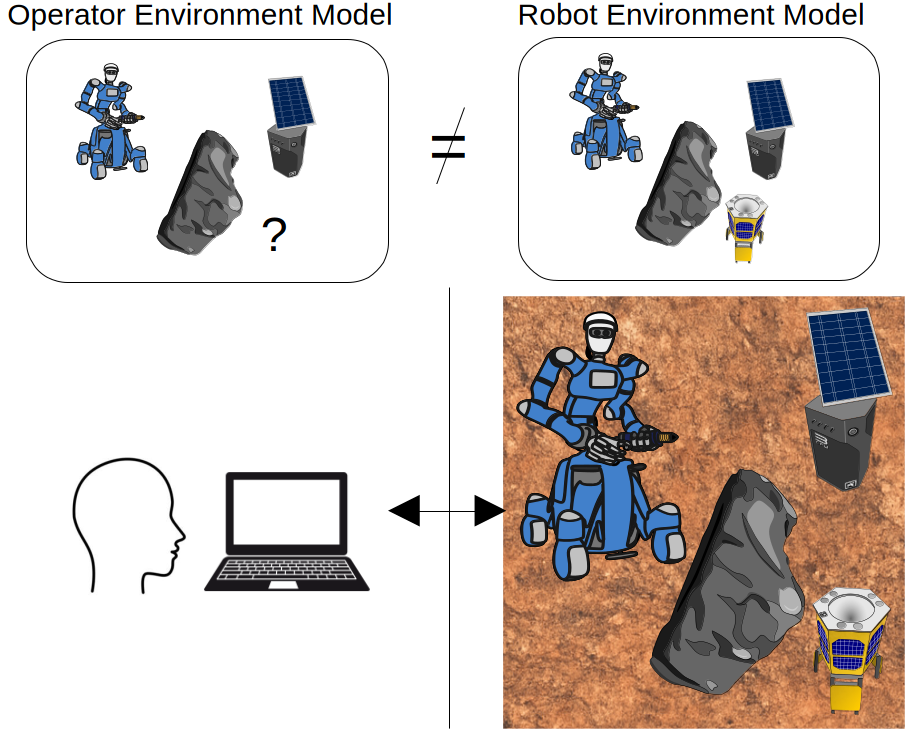
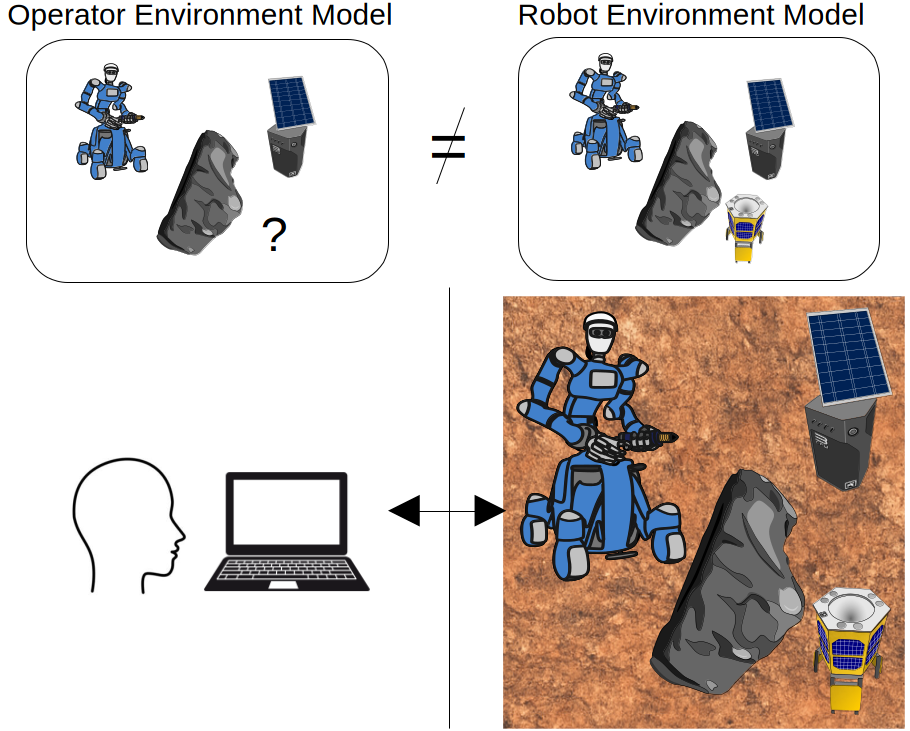
At DLR‑RM, we investigate and develop user interfaces that enable the teleoperation of robots in space. A key challenge for Human‑Robot Interaction (HRI) in teleoperation is ensuring that the operator’s mental environment model matches the robot’s internal environment model which the robot holds about the remote environment it operates in. When the two diverge, commands can be mis‑executed, leading to confusion and increased workload. This master’s thesis will investigate either how to detect such deviations or how to signal them to the operator. The chosen focus will be shaped by your prior experience and interests. In short:
- Detection focus – Design probabilistic machine‑learning methods to identify discrepancies between the operator’s and the robot’s environment models.
- Signal focus – Develop interaction strategies that can be embedded in a GUI to alert the operator to model deviations, prioritizing the most critical ones.

{kind=link}
Tasks:
- Literature research: review current research on environment‑model deviation detection and signalling in teleoperation.
- Concept design (Detection focus): create a framework that reasons probabilistically about model discrepancies using ML techniques.
- Concept design (Signal focus): design an interaction scheme for GUI‑based alerts, ranked by priority.
- Implementation: translate the chosen concept into a prototype for a stationary 7‑DOF space‑robot arm.
- Evaluation: conduct user studies or simulation experiments to assess effectiveness and usability.
What we expect from you:
- Bachelor’s degree in Computer Science, Electrical Engineering, Robotics Engineering, or a related field.
- Strong interest and knowledge in robotics and human–robot interaction.
- Focus‑specific knowledge:
- Advanced programming skills in at least one of: Python, C#, C++, or JavaScript.
- Hands-on-experience with robotic systems and relevant software frameworks, e.g., ROS, is a plus.
- Fluency in English.
For application, please first make contact (see below) to indicate your interest. We will then get back to you to send us a resume and transcript of grades as well as a description of relevant practical projects.
Further information:
Starting date: Approximately three months after application
Duration of contract: six to nine months
We look forward to exploring the future of space robot teleoperation together with you!