Regelung von Leichtbaurobotern
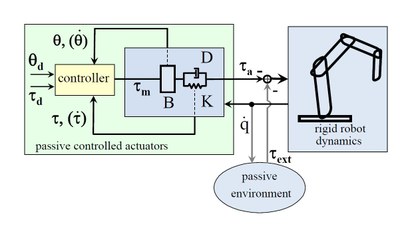
Für die Regelung unserer Leichtbauroboter wird eine kaskadierte Struktur aus Strom-, Gelenk- und kartesischer Regelung verwendet. Die modularen Gelenkeinheiten besitzen motor- und abtriebsseitige Positionssensoren sowie abtriebsseitige Drehmomentsensoren.