OOS-SIM
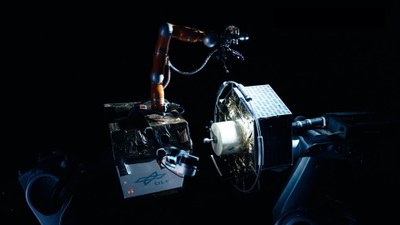
Das OOS-SIM (On-orbit servicing simulator) ist ein Simulator für Montage-, Wartungs- und Instandhaltungsarbeiten an Satelliten, die sich in einer Umlaufbahn um die Erde befinden. Zwei große Industrieroboter halten die Wartungseinheit und den Satelliten und simulieren deren Schwerelosigkeit.