
Master’s Thesis: Robust Multi-modal Place Recognition for Unstructured Environments via Geometric Priors
Your Mission:
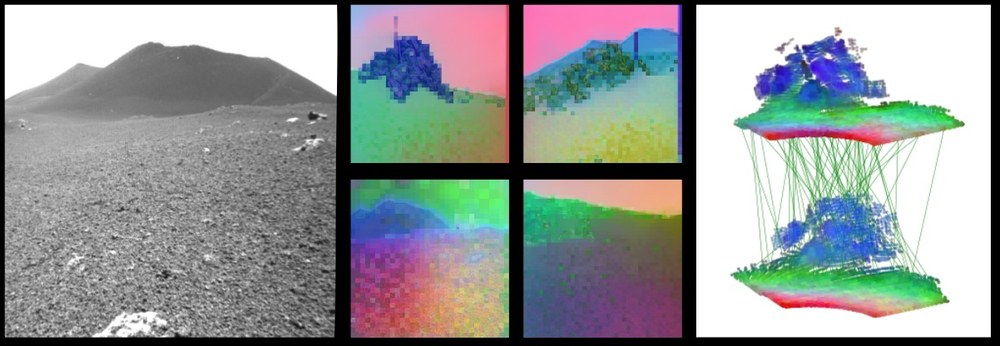
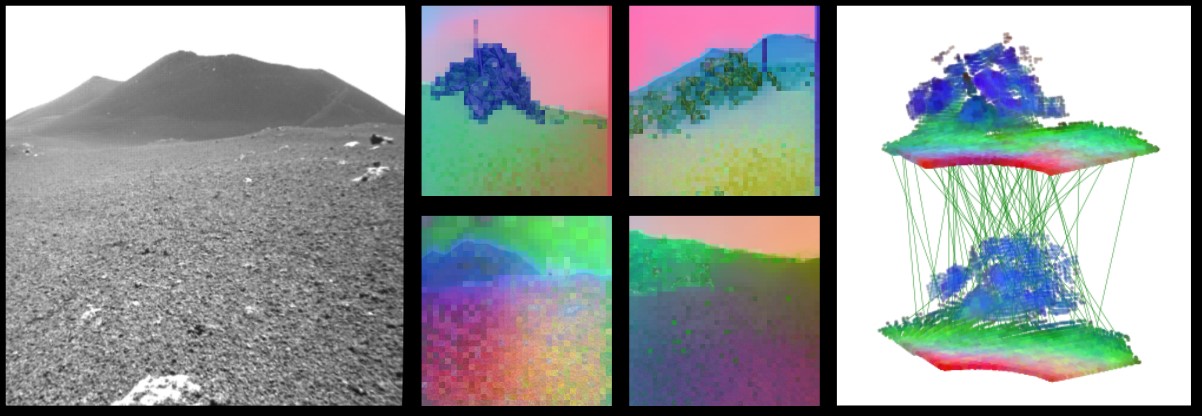
Reliable global localization and loop-closure detection are fundamental requirements for autonomous navigation in remote and unstructured environments, such as volcanic craters or planetary surfaces. While Visual Place Recognition (VPR) has seen significant progress in urban settings, traditional methods often struggle in natural terrains where perceptual aliasing (repetitive patterns) conditions are prevalent.
This thesis aims to investigate how multi-modal sensor data, specifically the combination of visual and LiDAR data, can be leveraged to prioritize stable, high-fidelity geometric features. You will explore how to intelligently fuse these modalities to achieve robust localization, even when faced with sensor-specific limitations such as disparate fields of view (FOV) and varying sensing ranges.

{kind=link}
Your Tasks:
- Literature Review: Conduct a comprehensive survey of state-of-the-art multi-modal place recognition and foundation models (e.g., ViT-based descriptors) applied to robotics.
- Methodological Development: Design and implement a multi-modal feature aggregation pipeline that explores the relationship between visual texture and 3D geometry.
- Sensor Harmonization: Develop strategies to address discrepancies between camera and LiDAR data, focusing on robustness in regions where sensor coverage is incomplete or asymmetric.
- Evaluation: Benchmark your approach using challenging, real-world datasets (e.g., the S3LI Vulcano dataset) against existing state-of-the-art global localization frameworks.
- Documentation: Clear presentation of results and contribution to a potential scientific publication (e.g. ICRA, IROS, RSS, etc.).
Your Qualifications:
- Pursuing a Master’s degree in Robotics, Computer Science, Engineering, or a related field.
- Strong proficiency in Python and deep learning frameworks (primarily PyTorch).
- Experience in Computer Vision or LiDAR processing (e.g., Open3D, PCL).
- Familiarity with Transformer architectures or Foundation Models is a significant plus.
- Ability to work independently and a passion for solving complex problems in field robotics.
What we offer:
- A highly relevant research topic at the intersection of deep learning and mobile robotics.
- Access to high-quality, unique datasets from recent field campaigns.
- An international and multidisciplinary research environment with expert supervision.