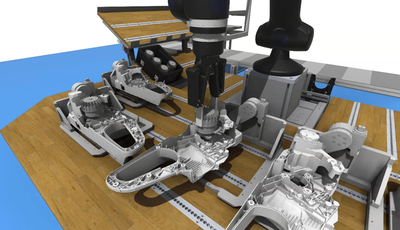
3D perception encompasses the acquisition of data based on commercially available or self-developed sensors, the creation of 3D models and formats in different representations, up to the use of these models/data for object recognition.
The most important goals of the research activities in the field of Ergonomics / Human Factors are the definition of user requirements and the empirical evaluation of human-machine-interfaces (HMIs)
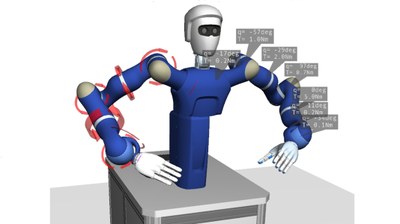
The modelling of cyber-physical systems requires a precise mathematical description. This applies to both the overall system (such as a robot) and the individual components in different domains, such as mechanics for the gearbox or electronics for the motors.
How to repair satellites, deep sea mining sites or nuclear plants without endangering humans? By using remotely commanded robots, or telerobotic technology.
The Institute conducts basic research into modelling the ground interaction of planetary exploration systems. The wheel-ground interaction, taking into account dynamic deformation effects, plays a major role here.