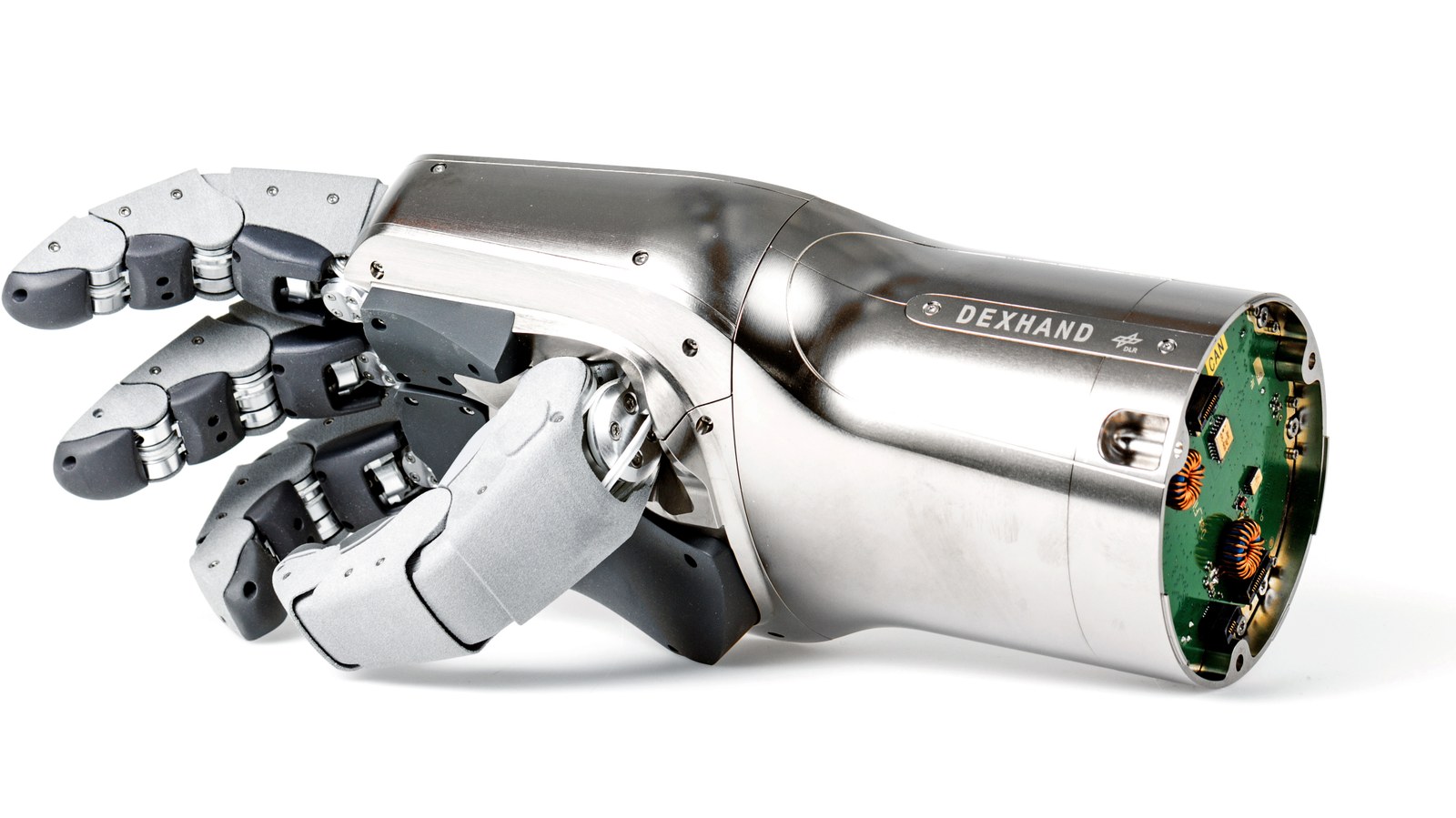
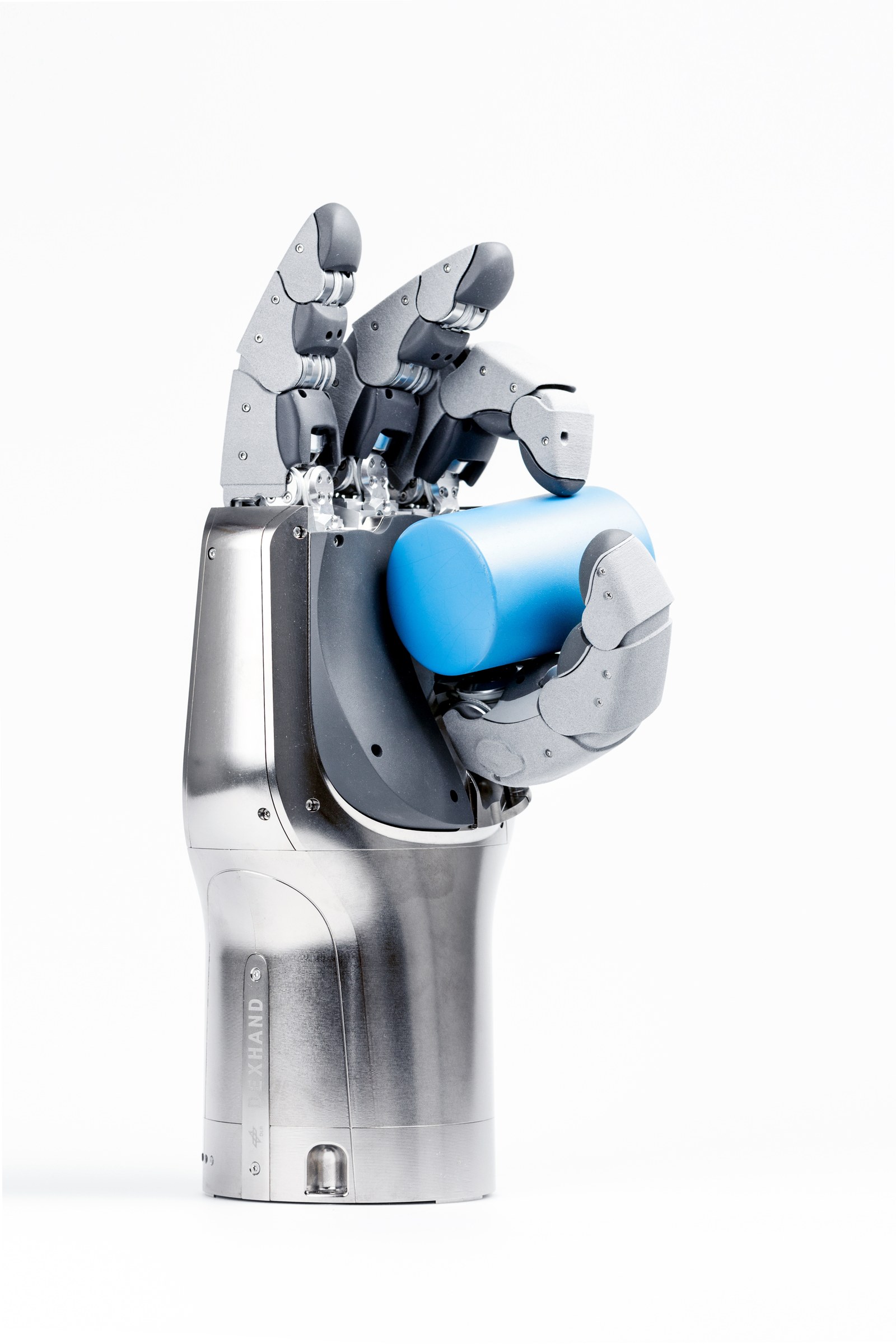
The DEXHAND is a multi-finger robotic hand designed for on orbit servicing in space. Thanks to its sensitiveness and dexterity, it is an excellent tool for performing the complex tasks involved in inspecting and repairing fragile components. In 2012, the DEXHAND was presented to the public for the first time.
Technical data
Size:
0,35 m × 0,20 m × 0,15 m
Weight:
4 kg
Degrees of freedom:
12
Sensors:
12 joint torque sensors
Energy supply:
18 V – 28 V, 3 A
Communication:
CAN
SpaceWire
EtherCAT
Computer:
Embedded DSP
Features:
Space qualifiable (robust against radiation)
Actuation via electric motors using tendons
System description
Robotics is a key technology in space missions, but in spite of their compactness and lightweight design, complex robotic systems have to withstand the effects of space (temperature, vacuum, radioactivity, lubricants, vibration and shock loads). With the ESA we are researching in the use of telemanipulated systems on the International Space Station (ISS) to assist astronauts. To be able to use the tools developed for astronauts, the DEXHAND has the size of a glove worn for EVAs (extravehicular activities). Its torque measurement and impedance control enable sensitive manipulation, the learning times are shortened by an intuitive operator interface. Since complexity and limited space cannot be achieved only with space-qualified components, the DLR is also examining the use of qualified COTS (components of the shelf).
Publications
Chalon et al., "Dexhand: A Space qualified multi-fingered robotic hand", in Proc. of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, pp. 2204-2210, May 2011.




{kind=link}
{kind=link}
{kind=link}
{kind=link}