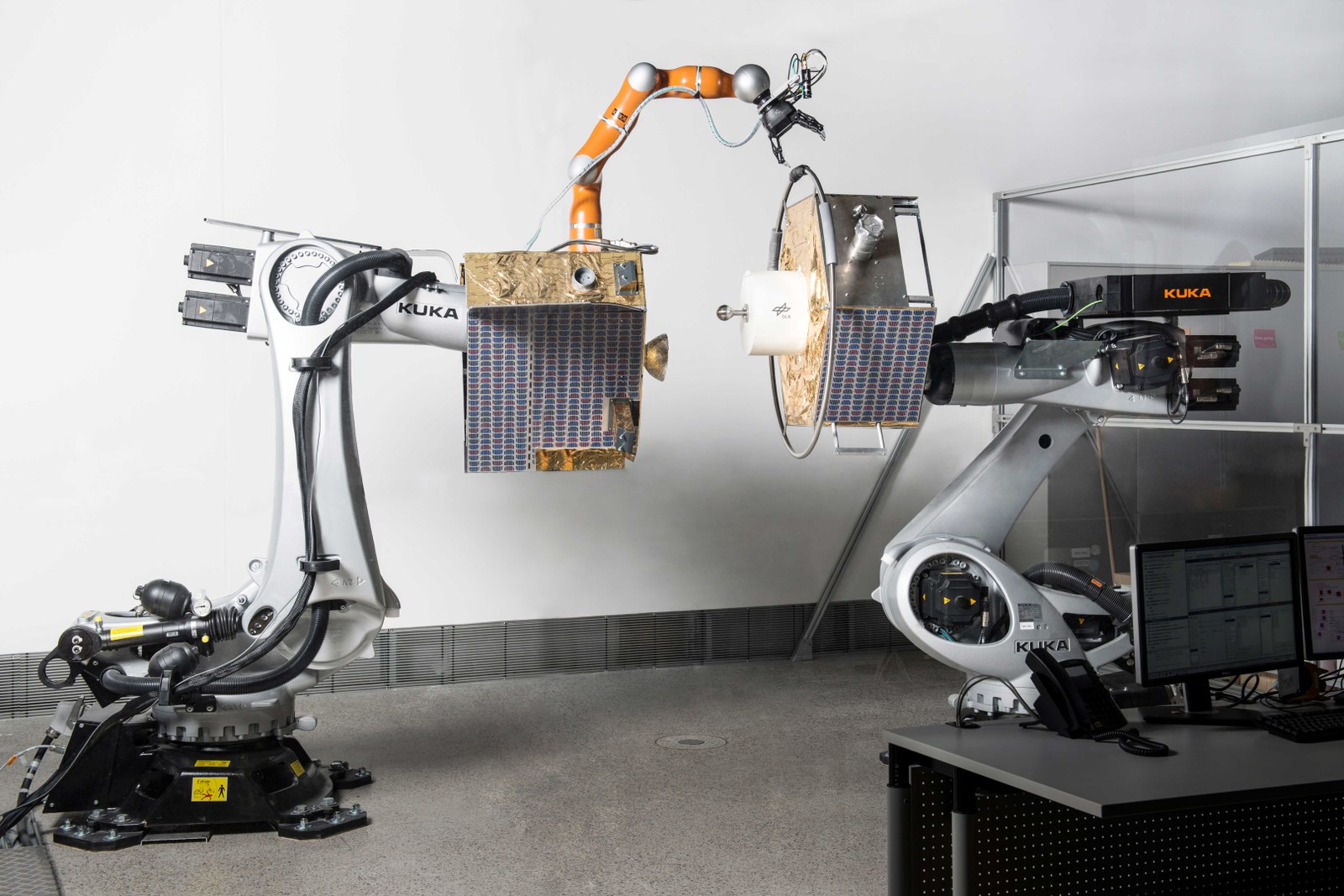
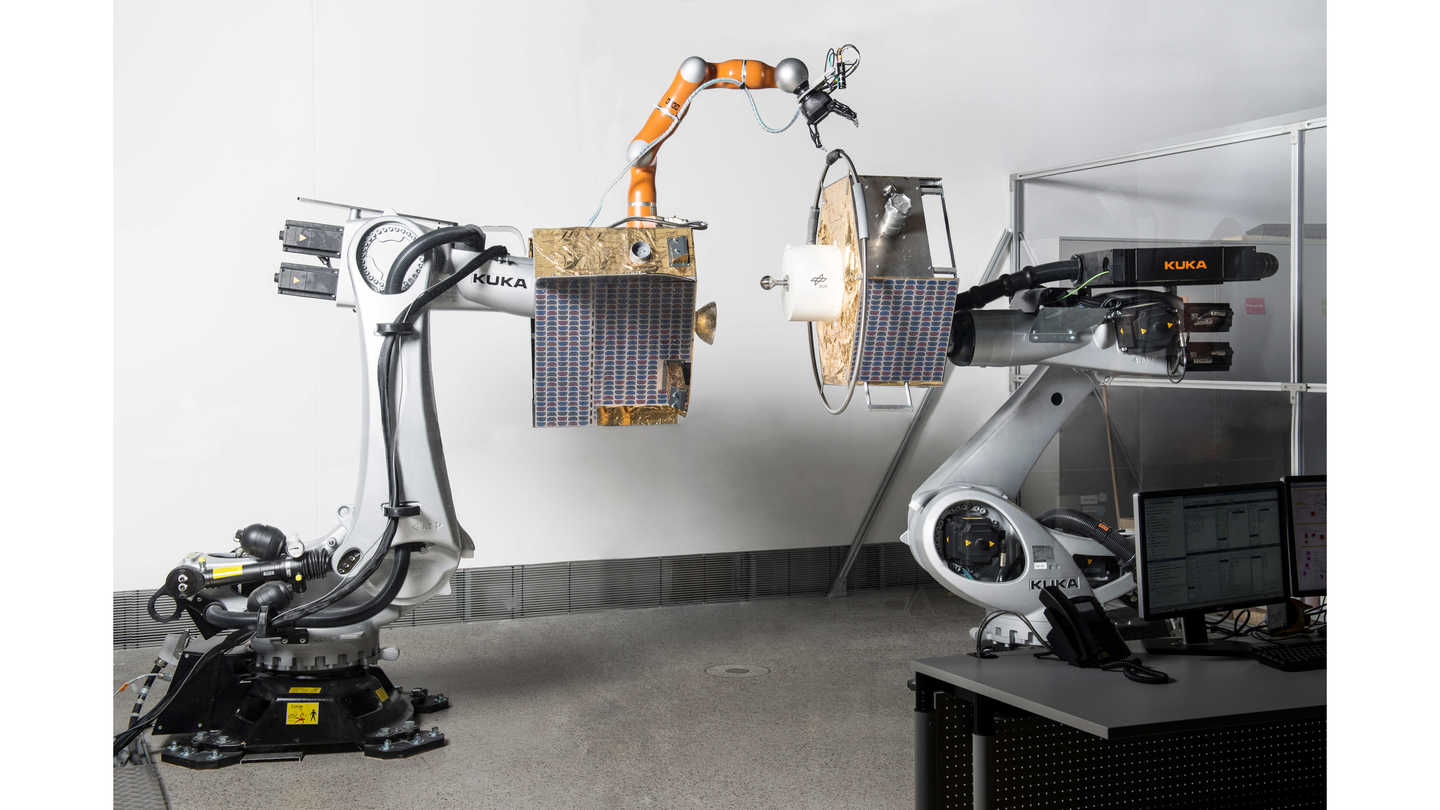
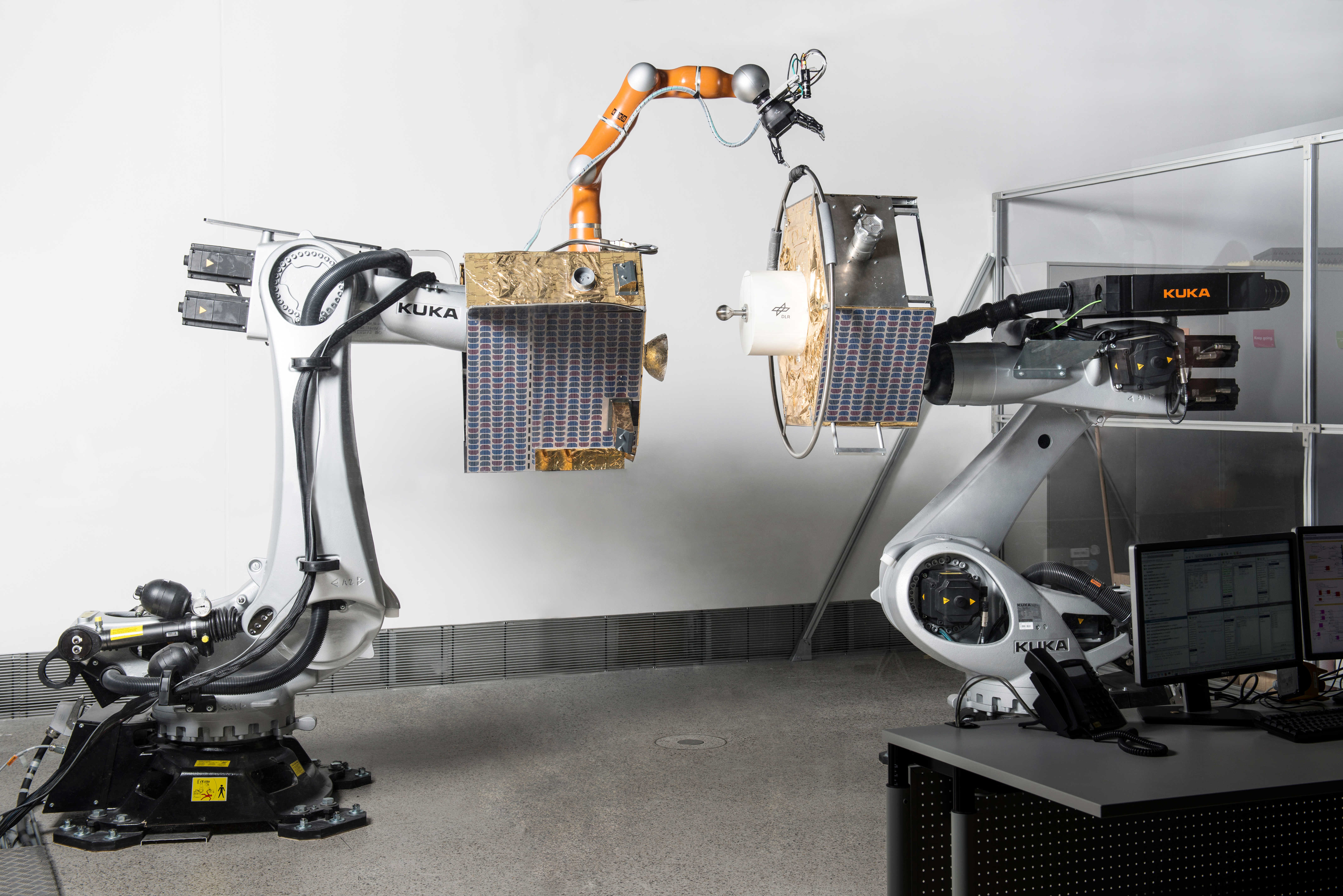
The OOS-SIM (on-orbit servicing simulator) is a simulator for on-orbit servicing tasks such as assembly, maintenance and repair work on satellites that are in orbit around the earth. It also investigates the system's applicability for the removal of non-functioning orbiting target satellites.
Two large industrial robots hold the servicing unit (or the chaser satellite) and the target satellite and simulate their weightlessness. A sensitive lightweight robot arm with gripper is mounted on the servicing unit. This entire servicing system is called free-flying robot in orbital robotics.
The OOS-SIM was first presented to the public in 2013.
Technical data
Size:
10m × 7,5m × 5m
Weight:
• 2 industrial robots (KR120), 1049kg each • 1 light weight robot (LWR IV+, successor of LWR III), 15kg • 1 haptic input device (LWR IV), 15kg
• 3 force/torque sensors (1 × LWR IV+, 2 × KR120) • stereo camera attached to gripper of robot • LIDAR attached to Chaser • IMU attached to Chaser
Working space:
23,38m² (cross section)
Communication:
Ethernet, EtherCAT, SERCOS, RSI
Special features:
• simulator for on-orbit servicing • simulation of orbital dynamics (zero gravity, multibody dynamics with contacts) • simulation of orbital lighting conditions • approaching, grasping and stabilization of a freely tumbling, non-cooperative target satellite with a free-flying robot can be investigated in autonomous or telepresent mode
System description
The OOS-SIM system has two benefits. On the one hand, it is able to simulate the multi-body dynamics of free-flying robots in orbit without the influence of gravity. For this purpose, the movement of the chaser satellite is realized with an industrial robot with six degrees of freedom. The system also allows the simulation of contacts between the light-weight robot and the target satellite – with observation of the orbital dynamics. Force-torque sensors at the interfaces between the satellites and the industrial robots measure the contact forces and supply them to a real-time simulation of the multi-body dynamics of the free-flying robot and the target satellite ("hardware-in-the-loop" method). In this application domain the configuration of our facility represents a worldwide unique example.
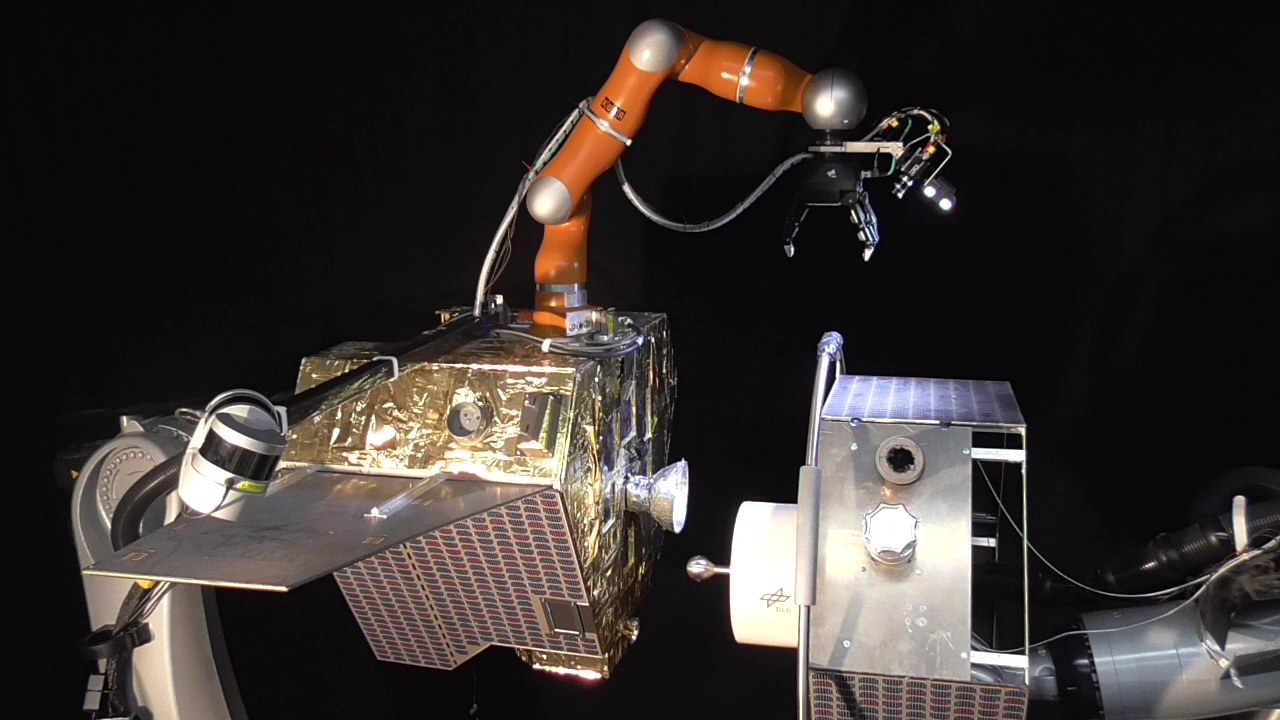
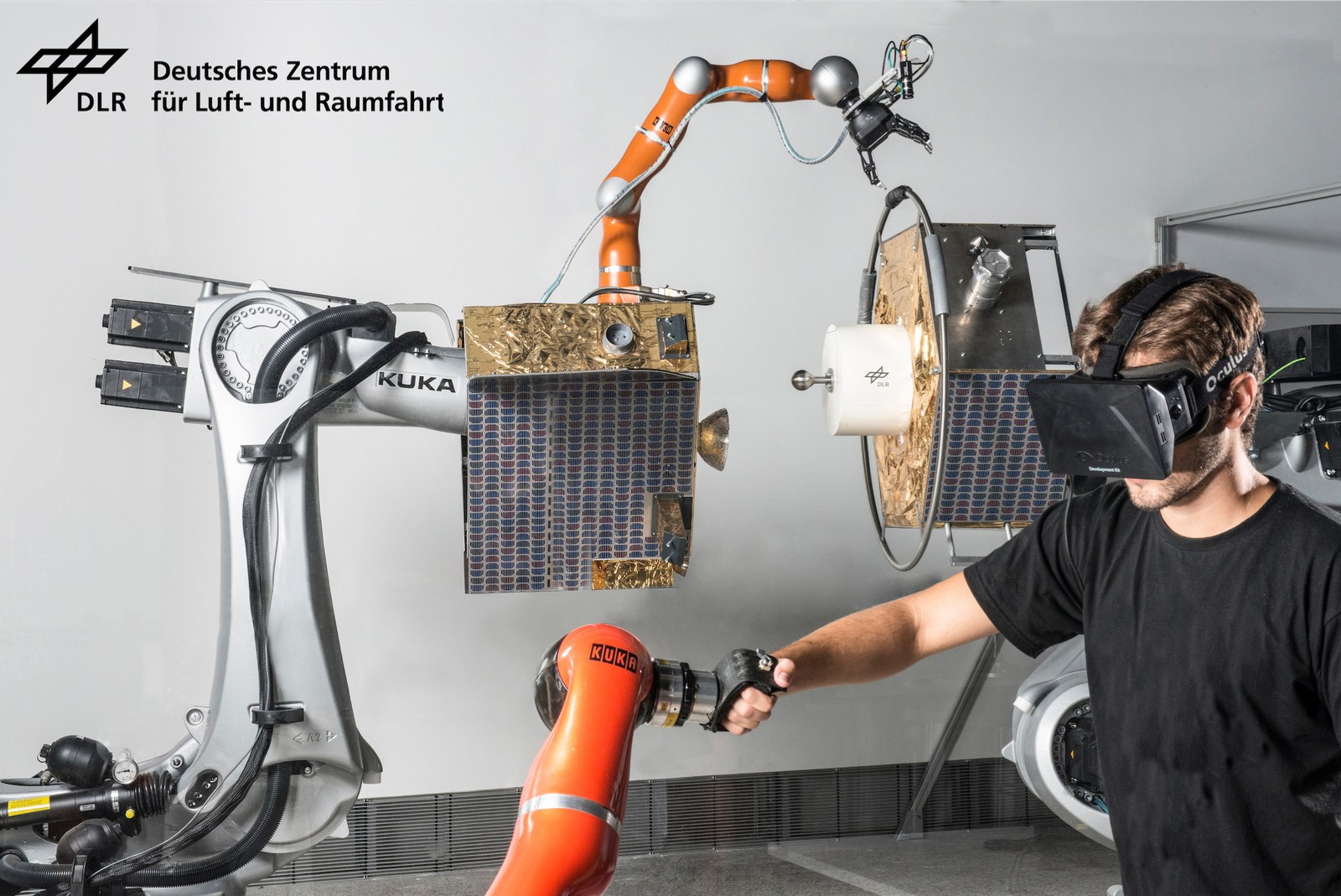
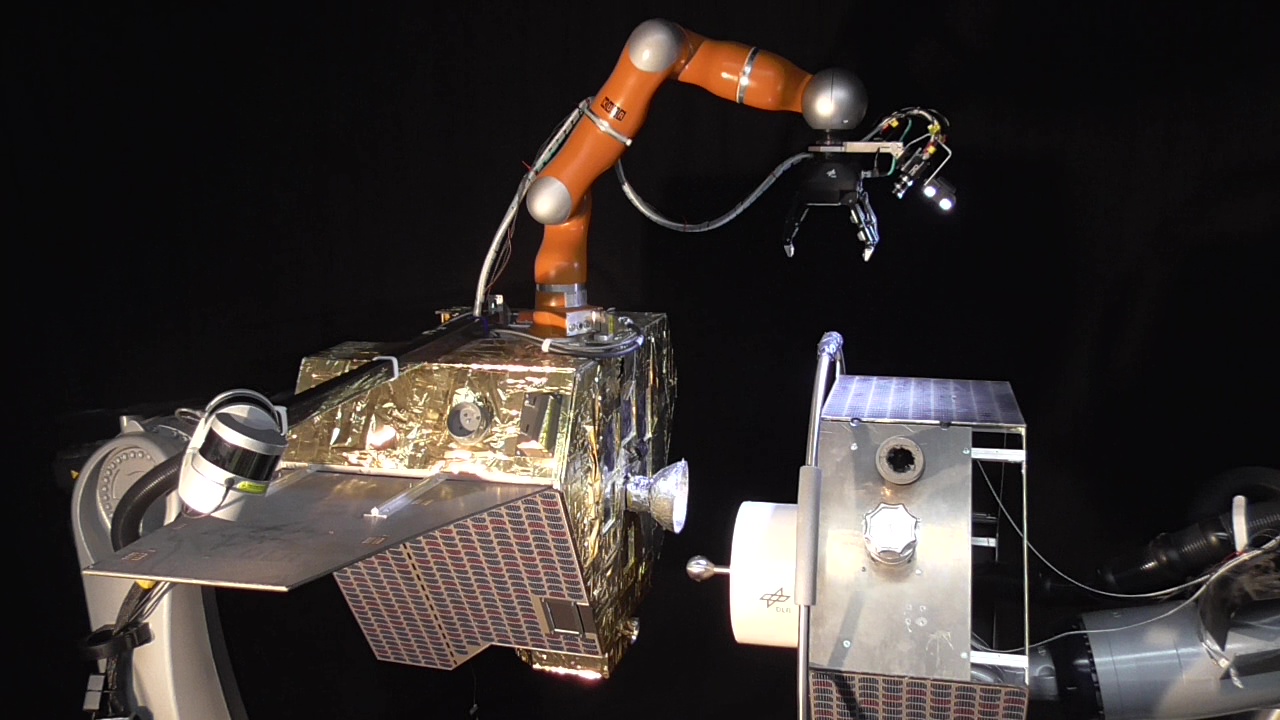
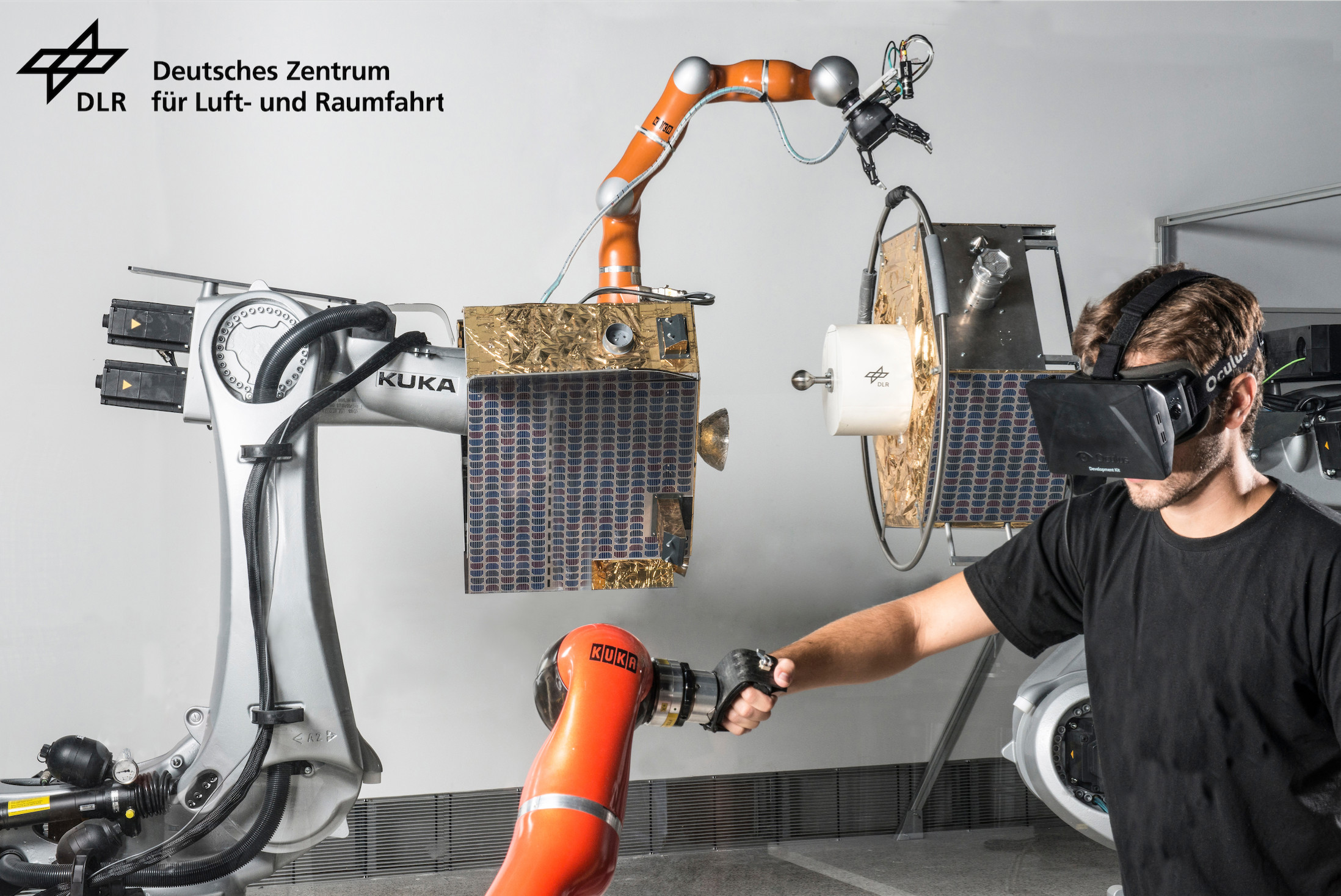
The second application of the facility is to provide a test and analysis platform for the development and validation of orbital robot control and image processing methods. With gravity-compensated dynamics, robot control requires suitable solutions to make the interaction between robot arm and satellite base motion controllable. Chaser satellite can be operated either with or without its actuators (e.g. thrusters of the attitude control system). Both strategies are current research topics at the Institute of Robotics and Mechatronics. The light-weight robot can also be commanded by an operator through teleoperation (or telepresence, with feedback of contact forces sensed by the robot arm). A stereo camera is mounted on the robot's gripper to support the robotic tasks (such as the capture process). A sun simulator and black curtains allow the simulation of different orbital lighting conditions under which image processing methods can be tested.
The ultimate goal of this facility is to demonstrate the capture of a non-cooperative tumbling target satellite. The non-cooperative character is based on the assumption that the target satellite is not controllable and does not have any helpful visual features on its surface.
One possible deployment scenario is Active Debris Removal, which removes target satellites from orbit by crashing them in a controlled manner so that they burn up in the Earth's atmosphere and fall into the sea.
OOS-Sim Facility
Future space missions will address complex tasks such as satellite repair and on-orbit assembly of large space structures. The OOS-SIM facility allows us to reproduce the dynamics of the orbital environment in which dedicated robots will operate. It also allows us to test and validate adequate robot control strategies, such as autonomous and telepresence control modes.
Artigas, Jordi, et al. "The OOS-SIM: An on-ground simulation facility for on-orbit servicing robotic operations." in Proc. of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, USA, pp. 2854-2860, May 2015.
Lampariello, R., Mishra, H., Oumer, N., Schmidt, P., De Stefano, M., & Albu-Schäffer, A. (2018). "Tracking control for the grasping of a tumbling satellite with a free-floating robot". IEEE Robotics and Automation Letters, 3(4), 3638-3645.
Giordano, A. M., Ott, C., & Albu-Schäffer, A. (2019). "Coordinated control of spacecraft's attitude and end-effector for space robots". IEEE Robotics and Automation Letters, 4(2), 2108-2115.
De Stefano, M., Mishra, H., Balachandran, R., Lampariello, R., Ott, C., & Secchi, C. (2019). "Multi-rate tracking control for a space robot on a controlled satellite: A passivity-based strategy". IEEE Robotics and Automation Letters, 4(2), 1319-1326.
De Stefano, M., Balachandran, R., & Secchi, C. (2019). "A Passivity-Based Approach for Simulating Satellite Dynamics With Robots: Discrete-Time Integration and Time-Delay Compensation". IEEE Transactions on Robotics, 36(1), 189-203.
Giordano, A. M., Dietrich, A., Ott, C., & Albu-Schäffer, A. (2020). Coordination of thrusters, reaction wheels, and arm in orbital robots. Robotics and Autonomous Systems.
H. Mishra, A. M. Giordano, M. De Stefano, R. Lampariello, and C. Ott, “Inertially-Decoupled Equations for Hardware-in-the-Loop Simulation of an Orbital Robot with External Forces". IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020. (accepted).



{kind=link}
{kind=link}
{kind=link}
{kind=link}