
Five years in space: DLR robot arm completes ISS mission with great success


{kind=link}
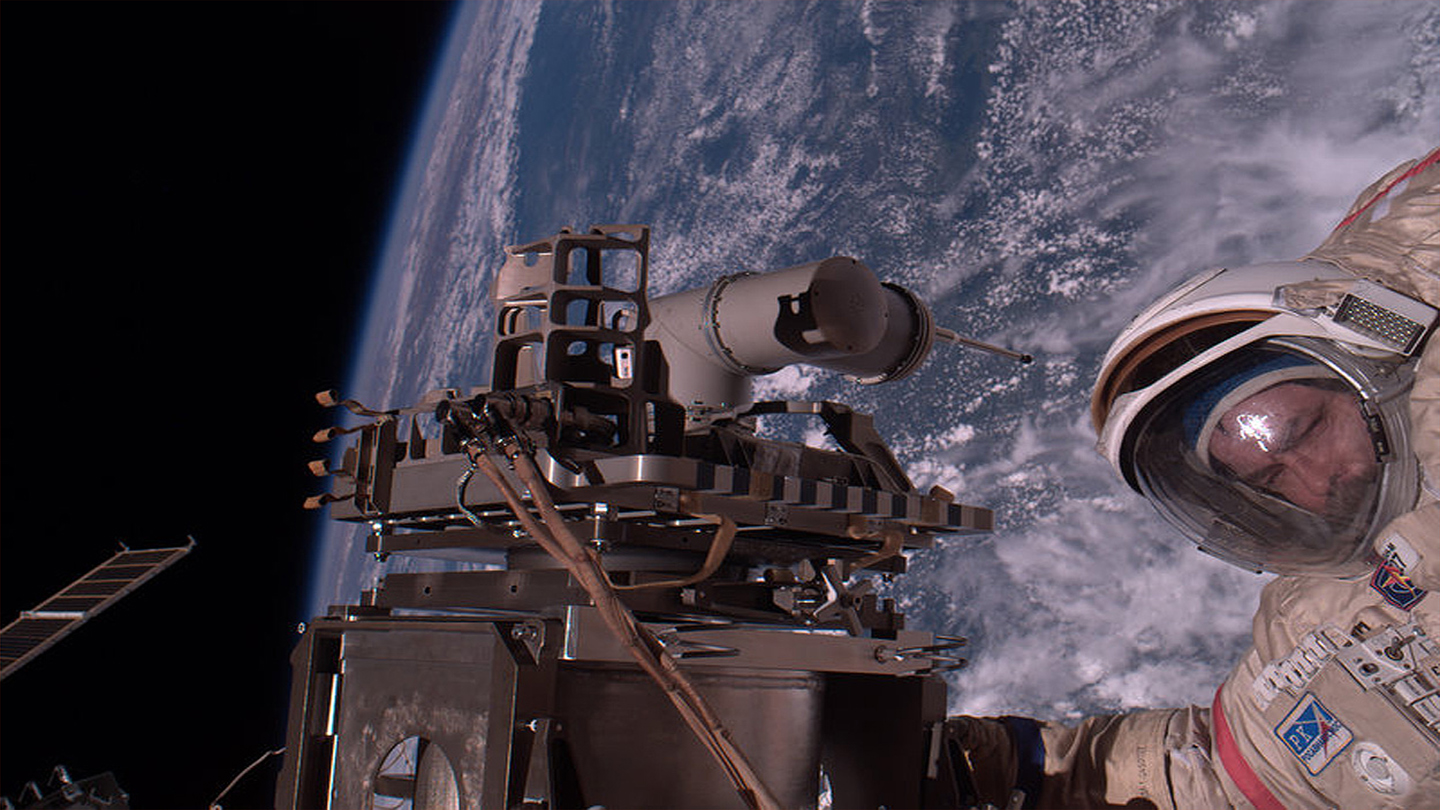
The first German robotics experiment in open space has come to an end: On the evening of 15 November 2010, during an outboard mission, Russian cosmonauts removed the ROKVISS (RObotic Component Verification on the ISS) robotic arm developed by the German Aerospace Center (DLR) from the Russian service module Swesda on the International Space Station and brought it into the interior of the ISS. As early as 2 November 2010, the ROKVISS team from the DLR Institute of Robotics and Mechatronics in Oberpfaffenhofen moved the robotic arm into the position required for this purpose, so that ROKVISS could be transported through the airlock into the interior of the ISS without any problems.
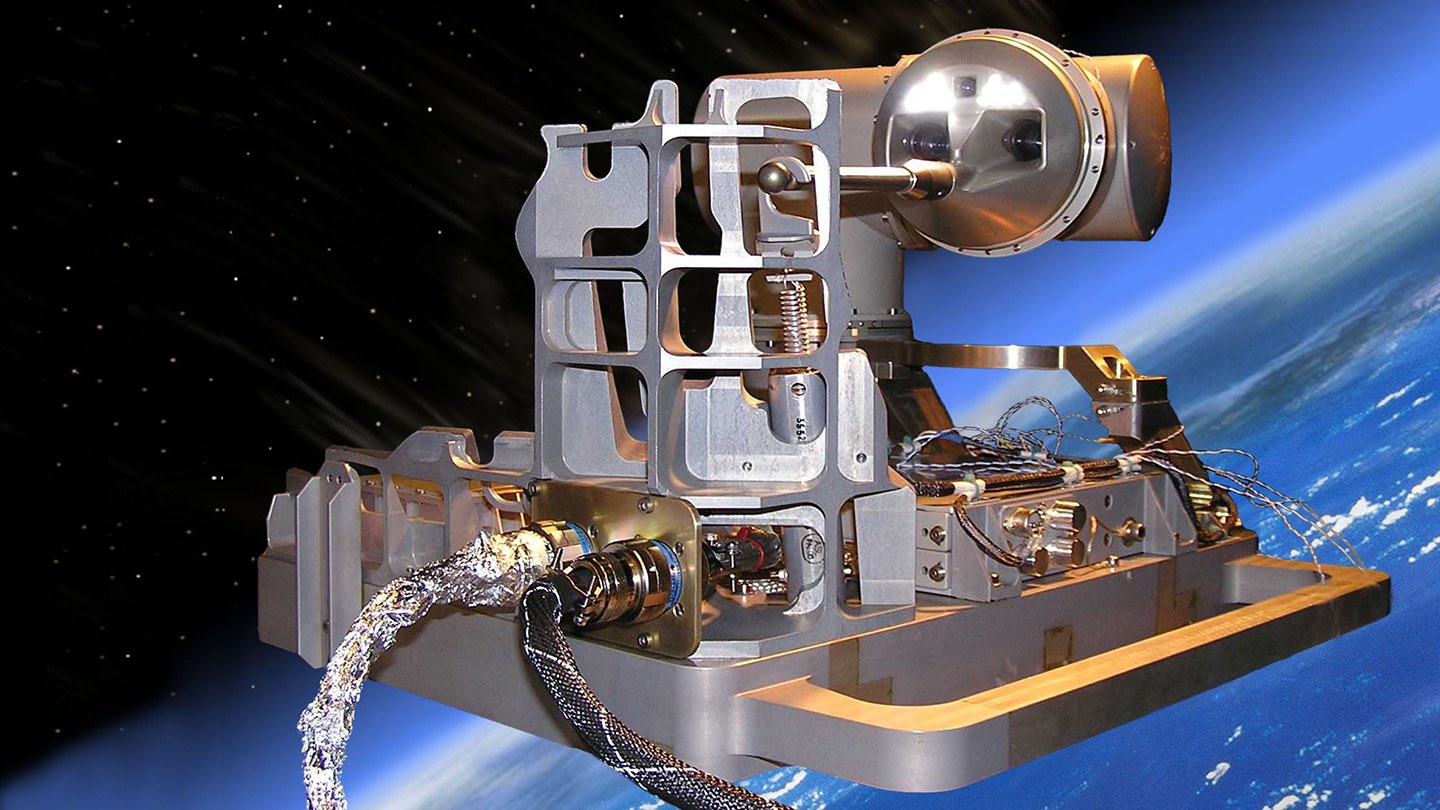
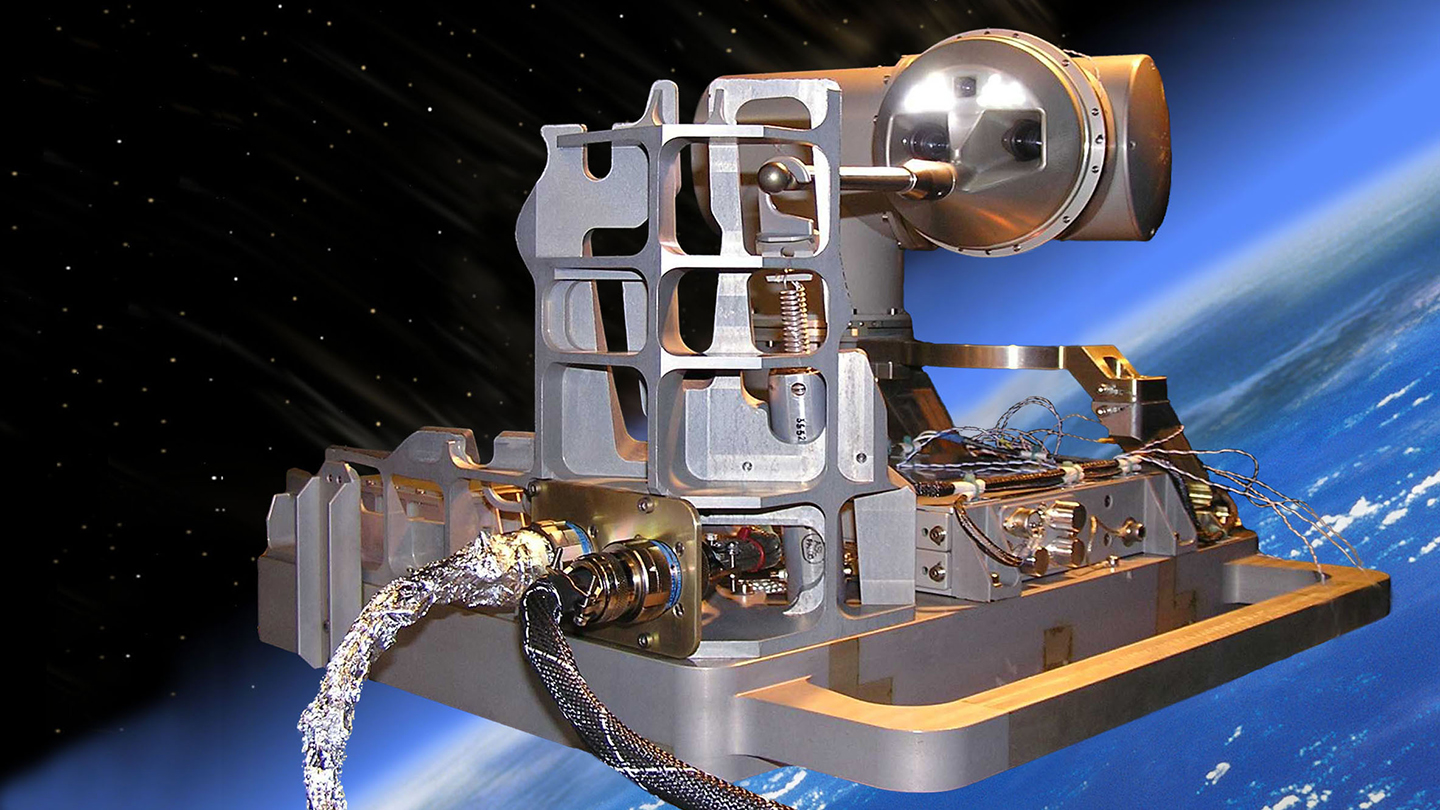
For five and a half years - from 22 March 2005 to 2 November 2010 - the 50-centimetre and seven-kilogram robotic arm was operated in space and successfully completed around 500 tests. With its two joints and a metal finger, ROKVISS carried out precise work in space.
Four to six contacts per month

{kind=link}
The technology experiment was controlled alternately fully automatically and in so-called telepresence mode by DLR's ROKVISS project team in Oberpfaffenhofen. The scientists had contact with the robotic arm four to six times a month - whenever the ISS crossed the reception range of the antenna system of the German Space Operations Center in Weilheim, south-west of Munich, thus enabling data transfer. "For example, we tested how precisely the robot arm could be controlled on the ISS using a joystick with so-called force feedback. The operator on the ground feels the force with which the robot presses against its environment in space", reports project manager Klaus Landzettel. In addition, the engineers also investigated the energy ROKVISS absorbs during the movement and how the friction of the bearings and gears behaves over long periods of operation in free space. Two integrated cameras documented the tests. Their images were transmitted in real time to the control room, giving DLR scientists a real impression of the state and functioning of the experiment.
Dangers in free space defied
The aim of the project, which was planned and developed in Germany, was to test and verify new robot hardware and powerful control concepts in real mission operation. In the future, this technology should support and relieve astronauts in complicated tasks in space. But it will also help to repair satellites in space. Conditions in the universe are fundamentally different from those on Earth. There is no air and no gravity. The temperatures in the robot joints fluctuated between minus 20 degrees and plus 60 degrees Celsius.
A further challenge was the radioactive
{kind=link}
radiation: "Due to the frequent ion bombardment, no electronic components were allowed to be destroyed. The ROKVISS joints contain several computers that can be destroyed if the electronics are hit by protons", DLR scientist Landzettel explains. For this reason, there is a system in the joint modules that ensures that, in the event of a short circuit, the power supply is automatically switched off and the stored energy is destroyed. This protective circuit has also worked reliably.
For DLR scientists, however, the dismantling on the ISS is not the end of the ROKVISS project: By March 2011, the two hinge units inside the ISS are to be unscrewed from the floor plate and the camera unit dismantled. This is the only way the joints will fit into the small storage space of the Russian Soyuz capsule, in which the joints are then to return to Earth. At the end of April 2011, project manager Klaus Landzettel and his colleagues expect ROKVISS to be back at the DLR Institute of Robotics and Mechatronics in Oberpfaffenhofen. The scientists will then be able to determine further essential information for the construction of future space robots based on the wear condition.
The 11.5 million euro experiment was financed by DLR with funds from the Federal Ministry of Education and Research. The DLR Institute of Robotics and Mechatronics developed and built the robotic components, EADS Astrium GmbH in Bremen, the Munich company Kayser-Threde and the Russian space agency ROSKOSMOS participated in the production and development of further components as well as the execution of the mission.