
Whole-body control for combined movement of robotic arm and wheelchair

{kind=link}
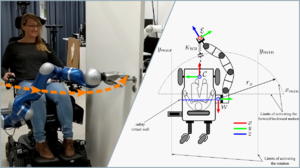
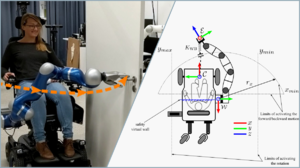
Lightweight robots combined with power wheelchairs can help restore mobility to people with disabilities. While such systems are available on the market, they are typically limited to fully manual control modes. In our research team, we have introduced a whole-body control concept for the EDAN assistive robotic system. This whole-body control system enables the realization of complex tasks that require arm and platform coordination while providing compliant behavior due to the impedance control law. This is evident in several tasks in our work, such as opening and passing through a door or opening a drawer. While these tasks would exceed the reach of the arm with a classical approach, whole-body control enables fast and efficient execution by automatically moving the wheelchair whenever the task requires it.
Publications
Maged Samuel Zakri Iskandar, Gabriel Quere, Annette Hagengruber, Alexander Dietrich, and Jörn Vogel, "Employing Whole-Body Control in Assistive Robotics", In: Proc. of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, pp. 5643-5650. 4-8 Nov 2019. [elib]