
DLR/HIT Hand


Based on the DLR Hand II, HIT (Harbin Institute of Technology) and DLR (German Aerospace Center) have jointly developed a multisensory robot hand. This hand, sold by Schunk as "SAH", demonstrates that highly advanced mechatronics can be embedded in applications at the medium-cost range.
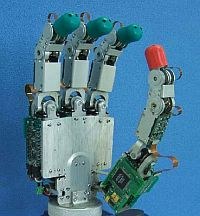
The hand consists of four identical fingers, one of which is equipped with an additional drive, that functions as an opposing “thumb”. In order to correspond to the human motor functions, each finger is made up of four joints. For the Where and How, sensors at the fingers provide the force and positioning data for each joint, among others. The perfect integration of all drives including electronics in fingers and palm enables the mounting to any robot arm.
Design
The technology alone does not make a hand. For use in the daily environment, specific demands are made on the enclosure. Protective cover for the cable routing, slip resistant gripper surfaces as well as appealing optics to prevent the fear of touch are only some of the requirements that this hand meets.
In the category 07. Industry & Construction, the DLR-HIT-Hand wins the prestigious 2007 iF design award. Quoting the reviewers, "The design clearly cites the extensor ligaments on the back of the hand, shows a line of life in the palm, and nails are indicated in the distal phalanxes. The whole hand looks very human-like and natural. This results in a high acceptance in human applications." (PDF)
Technology
The hand has four fingers with four joints and three actuators each. The thumb has an extra degree of freedom for fine manipulation and power grasping. The actuators are commercial brushless DC motors with analog Hall sensors. All the motors are integrated in the fingers and in the palm, respectively. Each joint is equipped with a contactless magnetic joint angle sensor and a strain-gauge based joint torque sensor. A high speed real-time serial communication bus (25 Mbps) has been implemented using FPGAs (Field Programmable Gate Array). Altogether only three cables are needed for the serial communication between the Hand and external CPU. The hand is controlled by one Digital Signal Processor embedded in a PCI board for any commercial PC. From the PC the hand can be controlled easily by a user-friendly interface and at the same time all the sensor data are displayed on the screen. The DLR Hand is recognized as technologically leading worldwide. By using commercially available brushless DC motors the DLR/HIT Hand was designed to become a close-to-production version of the DLR Hand II. It provides a promising base for a future series of complex multisensory robot hands.