
OPERA

Credit:
PR
Duration: | 2022-01-01 until 2024-12-31 |
Project partners: | |
Fields of Application: | Industrial manufacturing |
Funding: | Bayerisches Staatsministerium für Wirtschaft, Landesentwicklung und Energie, Fördernummer DIK0374 |
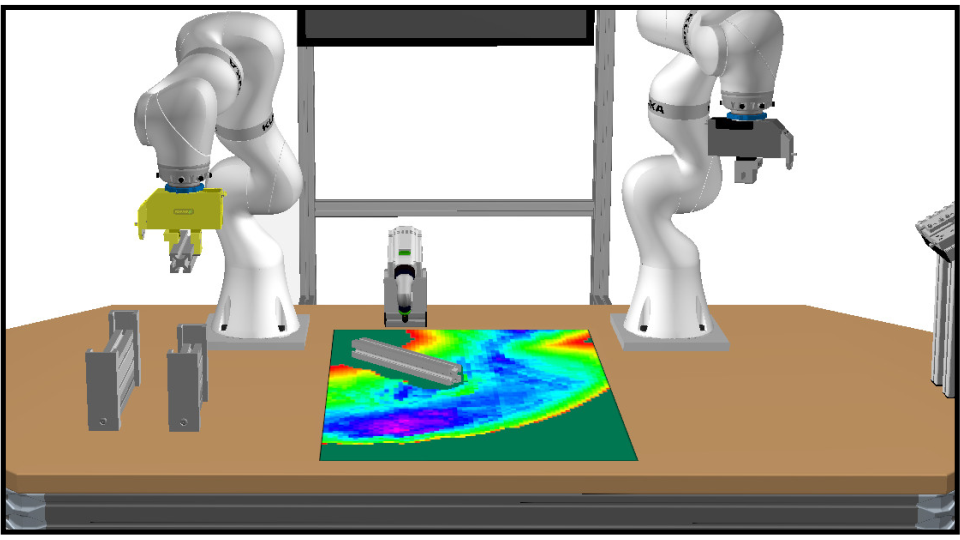
Projection of the robots reachability on the table
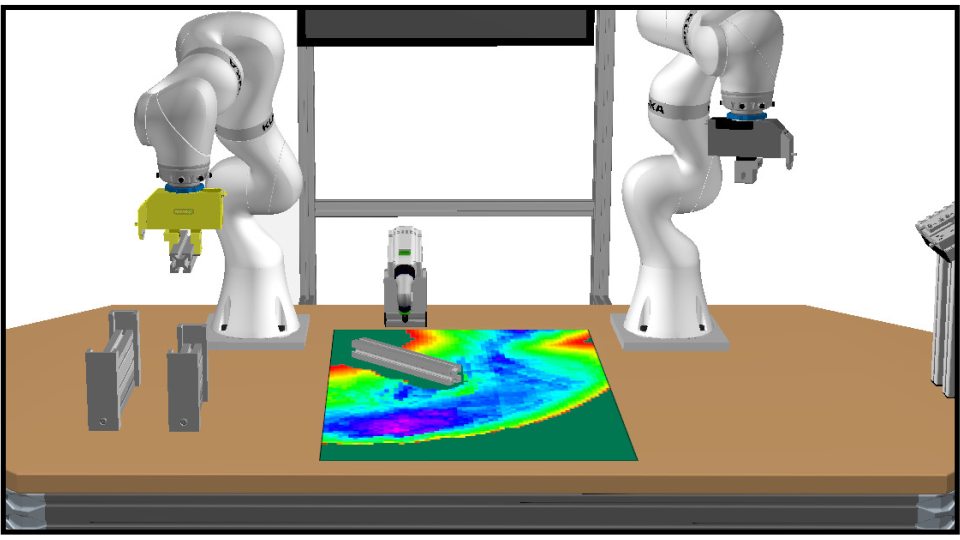
Projection of the overlapping workspace for two KUKA iiwa LBRs
{kind=link}