
Control

{kind=link}
Control of the Mobile Platform
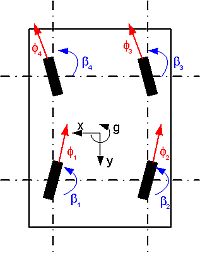
The mobile platform basically has four drivable and steerable wheels. In contrary to the castor like configuration used in some robots, the steering and the drive axes of each wheel intersect. Therefore the mobile platform is omnidirectional, but nonholonomic.
From the control point of view, three different tasks are distinguished for mobile robots:
- Point to Point Motion (i.e. Regulation),
- Path Following,
- Trajectory Tracking.
In contrary to holonomic systems, the regulation case, i.e. the stabilization at a given set point, usually is more difficult to solve than the tracking case for nonholonomic systems. A justification of this can be found by Brockett's theorem, which gives a necessary condition for a time-invariant system to become stabilize able by time-invariant smooth feedback.
For the control of the mobile platform within the Robutler scenario we use rather pragmatic approaches. Simple PD and PID controllers are used for controlling the drive velocity and the steering angle of each wheel separately. Based on these inner feedback loops we consider then a kinematic rather than a dynamic model of the mobile platform for the position control tasks. Friction and inertial effects are assumed to be compensated sufficiently by the individual drive and steering control loops of the wheels.
Based on the kinematic model an open loop velocity as well as a linear trajectory tracking controller have been implemented. For regulation tasks we basically use the same controller as for trajectory tracking. Due to the above mentioned restrictions according to Brockett's theorem the tracking controller however must be deactivated if the robot has reached the desired set point sufficiently close.
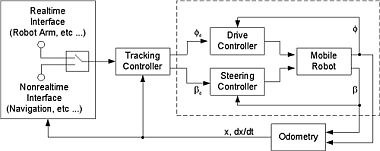

When the mobile robot is used in a combination with the impedance control of the arm (see below for more details) we usually prefer to use the velocity controller of the mobile platform. The control goal for the mobile platform is then defined such that the arm position should keep away from its workspace boundaries. Therefore a simple proportional feedback law is used, which gets the configuration of the arm as an input and gives the desired velocity of the mobile platform as an output.
Control of the Anthropomorphic Arm
The different control tasks for the arm can be classified as
- Position Control (Regulation, Tracking),
- Force Control, and
- Compliant Motion Control (Impedance control, Admittance control).
The 7-DoF DLR arms are especially designed for low weight. Consequently, the controllers must take account for the elasticity in the joints, which is caused mainly by the gears of the robot. For the controller design a flexible joint robot model is considered. Furthermore additional control problems arise due to the redundancy of the arm. A detailed description of the controllers developed for the DLR light-weight robots can be found here.
For manipulation tasks, impedance control of the arm is of special interest. Notice that in particular the use of joint torque sensors allows the design of highly sensitive torque and impedance controllers. The controllers proposed in [1,2] consist of an inner torque feedback loop and an outer impedance control loop which is based on the measurement of the motor side position. In [1,2] a physical interpretation of the inner torque feedback loop was given and used for a passivity based stability analysis of a Cartesian impedance controller.
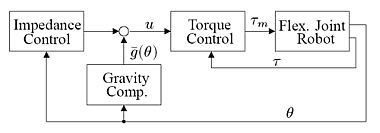
The purpose of the inner torque feedback loop is twofold. On the one hand, the torque feedback causes a decrease of the effective motor inertia for forces acting on the link side. Thereby it enhances the vibration damping effect of an additional outer control loop. On the other hand, it also diminishes the effects of motor side friction since the joint torque sensors are placed on the link side.
In addition to the torque controller, an outer impedance control loop is used, which is based on the measurement of the motor position.
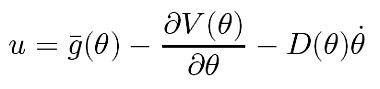
The first part of this control law corresponds to the online gravity compensation term introduced in [1]. This particular gravity compensation term allows compensating for the static effects of the link side gravity torques, but is based solely on the measurement of the motor side position. In addition to this stiffness and damping terms are implemented via a potential function and a positive definite damping matrix.
Control of the Anthropomorphic Hand
See section Hands
References
[1]"A Passivity Based Cartesian Impedance Controller - Part I: Torque Feedback and Gravity Compensation", Ch. Ott, A. Albu-Schäffer, A. Kugi, S. Stramigioli, and G. Hirzinger, International Conference on Robotics and Automation 2004, pp. 2659-2665.
[2] "A Passivity Based Cartesian Impedance Controller - Part II: Full State Feedback, Impedance Design and Experiments", A. Albu-Schäffer, Ch. Ott, and G. Hirzinger, International Conference on Robotics and Automation 2004, pp. 2666-2672.