Water in liquid form is the foundation of life on Earth. Mars once had oceans as well. From a physical standpoint, liquid water could still exist in Valles Marineris - Mars' deepest canyon and the largest known canyon in the Solar System. As such, it is the most reasonable place to search for extraterrestrial life. To conduct a thorough investigation of Valles Marineris, DLR is adopting a swarm robot approach. This swarm of robots will be designed to navigate autonomously and work collaboratively to reach the various points of interest (POIs). The VaMEx initiative is investigating how these robots might function.
Valles Marineris is the largest canyon in the Solar System, stretching along the Martian equator. The canyon is 4000 kilometres in length and over seven kilometres deep. In some places, it is up to 10 kilometres deep. The atmospheric pressure on the planet's surface is approximately six millibars, which corresponds to the triple point of water: This means that water in liquid form cannot physically exist there; water can only take the form of ice or water vapor in the atmosphere. However, atmospheric pressure at the bottom of Valles Marineris is just under 13 millibars - well above the triple point of water - which is why water can exist in its liquid state there.
Liquid water is central to the search for extraterrestrial life in astrobiology. According to current scientific understanding, the origin of all life on Earth can be traced back to the early oceans. Early on, Mars developed similarly to Earth and was once covered by oceans. But unlike on Earth, this phase on Mars came to an end with a global ice age that continues to this day. However, during its first 1.5 billion years, life may have emerged on Mars much like it did on Earth, starting with single-celled organisms that eventually evolved into multicellular organisms.
The goal of the VaMEx (Valles Marineris Explorer) project is to search for and investigate extraterrestrial life forms in the Valles Marineris region on Mars using an autonomous drone swarm that includes rovers, crawlers, and unmanned aerial vehicles (UAVs).
Rovers, crawlers & drones on Mars – the Valles Marineris Explorer project
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Rovers, crawlers & drones on Mars – the Valles Marineris Explorer project
The goal of the VaMEx (Valles Marineris Explorer) project is to search for and investigate extraterrestrial life forms in the Valles Marineris region on Mars using an autonomous drone swarm that includes rovers, crawlers, and unmanned aerial vehicles (UAVs).
Remnants of these former seas may have been retained in the form of small pools of liquid water within Valles Marineris. If so, they would constitute a potential refuge for extraterrestrial life. However, the only way to examine this possibility is by deploying robots on the surface. This this terrain is extremely diverse and complex, where the robots would have to navigate steep slopes, canyons, caves, and subsurface lava flow channels - in short, environments that could serve as biological niches, protecting life from the Sun's intense UV radiation, among other things. A swarm robots capable of moving by crawling, driving, and flying would be better suited for this than a lone rover. These robots would navigate autonomously and conduct investigations. Such a diverse swarm of robots would be more reliable, flexible and scalable - and more cost-effective per robot - than a single robotic mission when viewed in the context of the overall mission.
Valles Marineris is a vast area: travelling from a safe landing site to a location where it would be worthwhile to search for traces of life would require travelling very long distances. To accomplish this within a reasonable timeframe, the swarm drones would need to travel at a sufficiently high speed. To do so, they must be able to reliably detect obstacles and difficult terrain, such as very fine sandy ground, and determine in real time whether another route should be taken. Deploying such a robot swarm presents major challenges: the swarm cannot be controlled from Earth, as it takes at least nine minutes for a radio command signal to reach Mars. Depending on the relative distance between Mars and Earth, this time can be as long as 20 minutes. If remotely controlled, a robot would advance only a few centimeters per day. Each robot must therefore be able to autonomously determine its position within the rugged terrain. Furthermore, it must be able to navigate it independently. In particular, it must also be able to autonomously decide whether a planned path is safe or dangerous. For example, rolling and walking robots face a problem when the terrain behaves differently than originally anticipated. This challenge can be addressed using various sensors on the robot, which provide immediate awareness of the current environment and enable adapted decision-making.
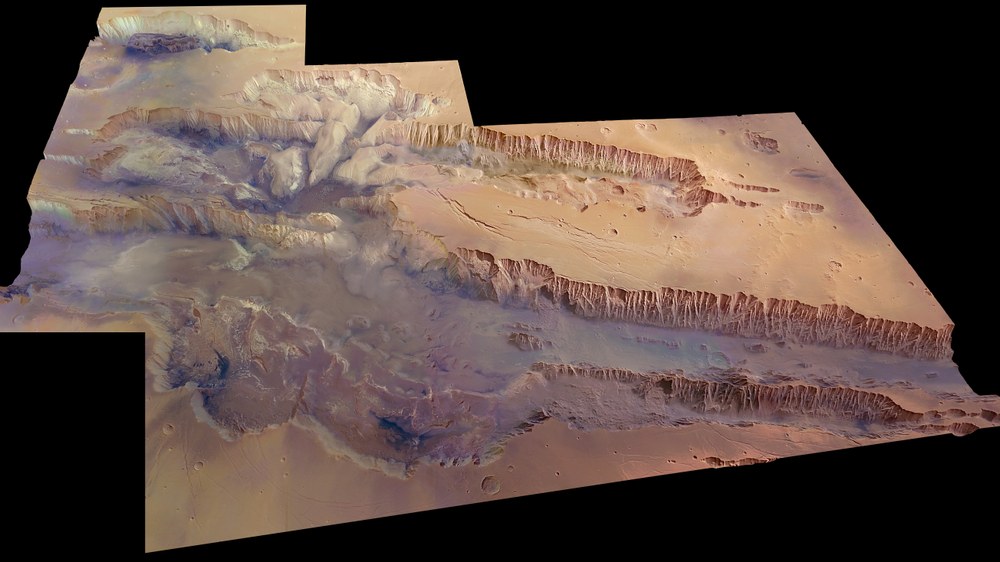
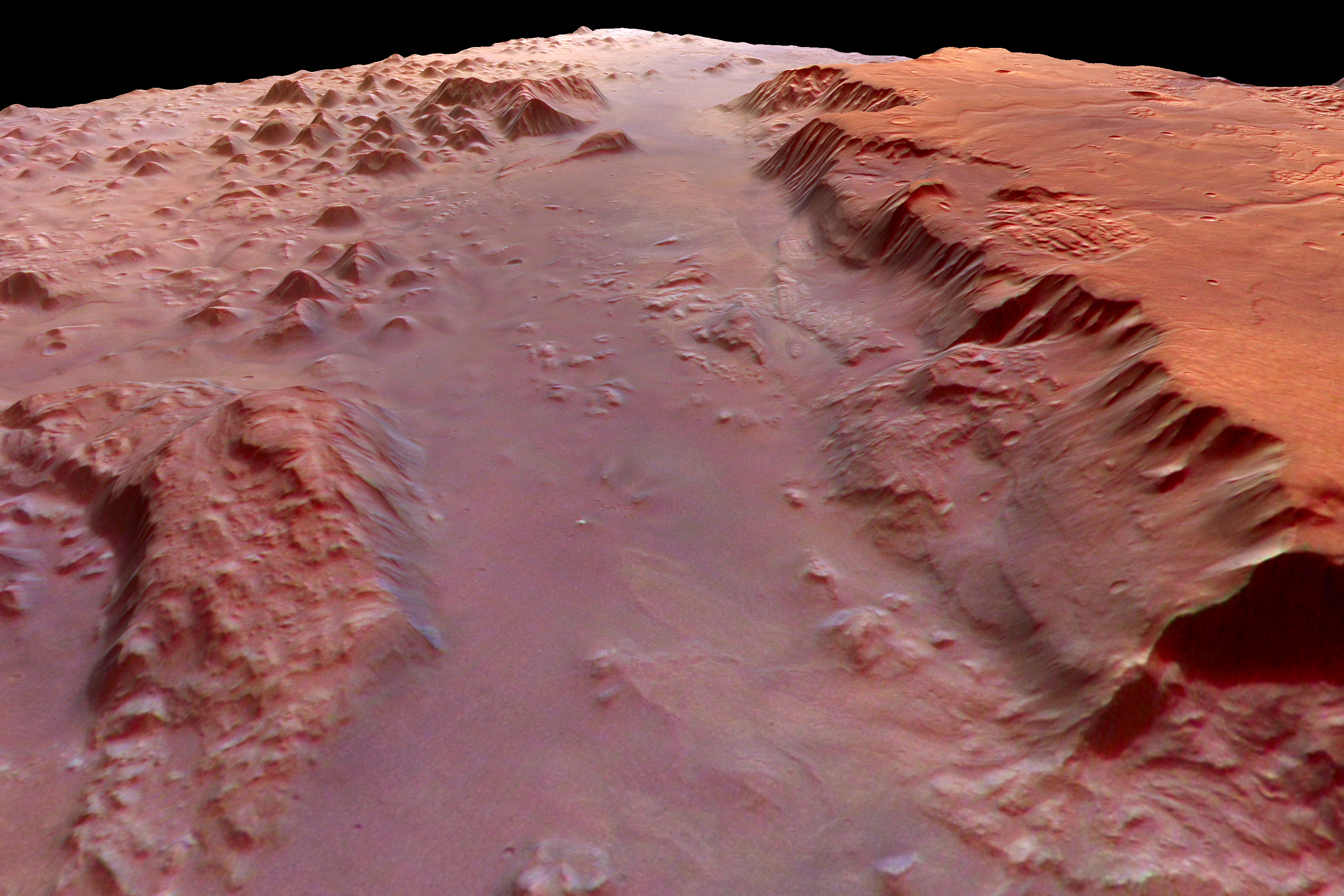
Terrain model of Valles Marineris
A terrain model of Valles Marineris shown at a 45-degree angle relative to the surface, rendered in near-realistic colours. The image covers an area of 630,000 square kilometres with a ground resolution of 100 metres per pixel. The model was created from 20 individual images acquired by the High-Resolution Stereo Camera (HRSC) on board Mars Express. The largest section of the rift valley running across the image is known as Melas Chasma. Candor Chasma is the connecting canyon immediately to the north, with the small canyon Ophir Chasma behind it. Hebes Chasma can be seen at the top left of the image.
The robot swarm must also be able to organise itself as a whole. To do this, each robot must know where all the other members of the swarm are located. Here on Earth, satellite navigation provides this capability; however, this technology is not available on Mars. Therefore, all robots must be able to determine their own position relative to the terrain as well as to each other using their onboard instruments. This positional data can then be compiled into a shared map of the environment and the swarm.
The VaMEx initiative is developing innovative navigation and exploration technologies for all these applications. The goal is to enable highly autonomous exploration of Valles Marineris. In addition to researching and designing new approaches, the focus is primarily on conducting preliminary demonstrations of the developed core technologies in field test campaigns on Earth in environments that resemble Mars as closely as possible, such as those found in very arid deserts.
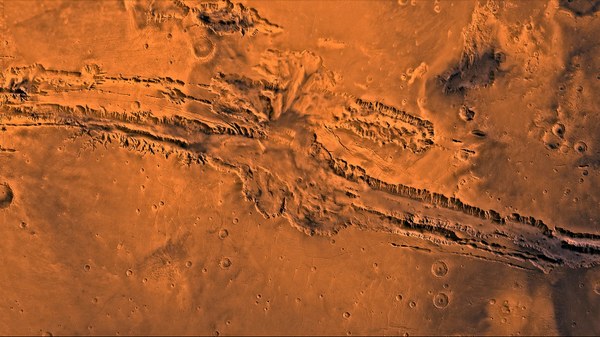
Eos Chasma, the southern part of Valles Marineris on Mars
The image, acquired in 2004 by the High-Resolution Stereo Camera (HRSC) aboard ESA’s Mars Express spacecraft, shows the southern part of Valles Marineris, known as Eos Chasma. The image resolution is approximately 80 metres per pixel. The floor of the rift valley is shrouded in a haze that the camera cannot penetrate. It is suspected that the bottom of the rift hosts liquid water, which could harbour life.
The VaMEx initiative consists of several complementary research projects that build on one another. Four projects have been completed so far: VaMEx-CoSMiC, the initial collaborative project, began in 2012 and developed the fundamentals for the navigation of walking, rolling and flying robots by means of their onboard instruments, such as laser scanners (LIDAR), cameras and radio communications systems. In addition, methods were investigated to enable the robot swarm to organise itself autonomously.
A subsequent development phase beginning in 2015 involved the development of an environmental awareness system for a humanoid walking robot based on optical sensors within VaMEx-VIPE. This sensor system also controls the positioning of the robot's body elements. The VaMEx-LAOLa project investigated methods for locating swarm robots on the planet's surface without satellite assistance. In VaMEx-VTB, the drone swarm was simulated in a virtual test environment.
These previously developed subsystems are currently being integrated into a comprehensive system during the approximately three-year “VaMEx-3” phase. This involves closely integrating the systems and processes and further developing them across a total of five subprojects. All VaMEx-3 subprojects have carried out a joint requirements analysis, the results of which were presented during a joint field test in 2025.
In the VaMEx3-VRN subproject, the virtual test environment from VaMEx-VTB is being further developed to be able to test the robots’ software and hardware in a realistic simulation prior to field testing. The VaMEx3-RGE subproject involves further developing the algorithms for navigation and environmental perception and integrating them into the overall VaMEx3 system. The VaMEx3-APO subproject focuses on developing a fail-safe method for determining position and orientation. In VaMEx3-AE, flying robots are adapted to the specific atmospheric conditions of Mars. In the VaMEx3-MarsSymphony collaborative project, which was added in 2024, a solution is being developed that allows robots located inside a cave to continue to communicate with satellites and navigate autonomously and safely, even in this challenging environment. This will enable future exploration of caves and lava tunnels within Valles Marineris. By adding and integrating multiple small satellites into the overall VaMEx system, the autonomy of the robot swarm is to be further increased.

{kind=link}
{kind=link}

