
Master student in robotics, computer science or computer graphics (f/m/x): Multi-Modal Place Recognition for Simultaneous Localization and Mapping in Outdoor Unstructured Environments
What to expect:
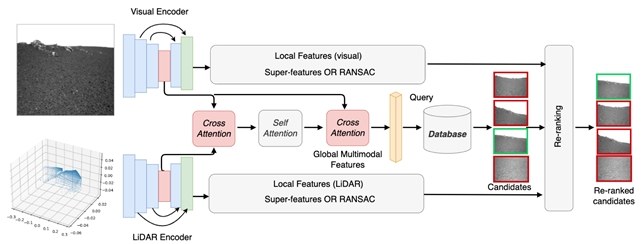
A critical skill towards for a mobile robotic system to operate autonomously in a GNSS-denied environment, such as planetary bodies, is the ability to recognize previously visited places. This way, a robot can compensate the position error resulting from drifts due to sensor noise, through the practice of establishing “loop closures” in a SLAM system. As a result, the robot can not only perform drift-free localization, for long-term operations, but also create globally consistent 3D maps, which enables autonomous exploration.
The task of place recognition is especially challenging in outdoor unstructured environments due to visual aliasing and absence of unambiguous visual or structural features. The objective of this thesis work is to develop a place recognition module, extending an approach already developed in-house within the Department of Perception and Cognition, improving performances in the unstructured case and testing it in relevant data captures in analogue planetary environments.

{kind=link}
What we expect from you:
- Bachelor’s degree in Computer Science, Electrical Engineering, Robotics Engineering or a similar
- Solid knowledge on visual Simultaneous Localization and Mapping approaches
- Solid knowledge on image processing techniques and pattern recognition (e.g. feature detection and matching, ..)
- Very good Python, and good C++ coding skills
- Knowledge on Deep Learning approaches for image processing, and experience with the PyTorch library
- Fluency with the English language
- Intent to disseminate the results of this work through publications in relevant computer vision or robotics conferences
To apply for this position, please include a resume and transcript of grades.