We present datasets of 2.5D elevation maps of planetary environment that were collected on Mt. Etna during the space-analogous ARCHES mission. In addition to the raw elevation maps, we provide cost maps that encode the traversibility of the terrain.
These datasets are meant to be used for bench-marking of path-planning algorithms in an unstructured planetary-analogue environment for mobile robots.
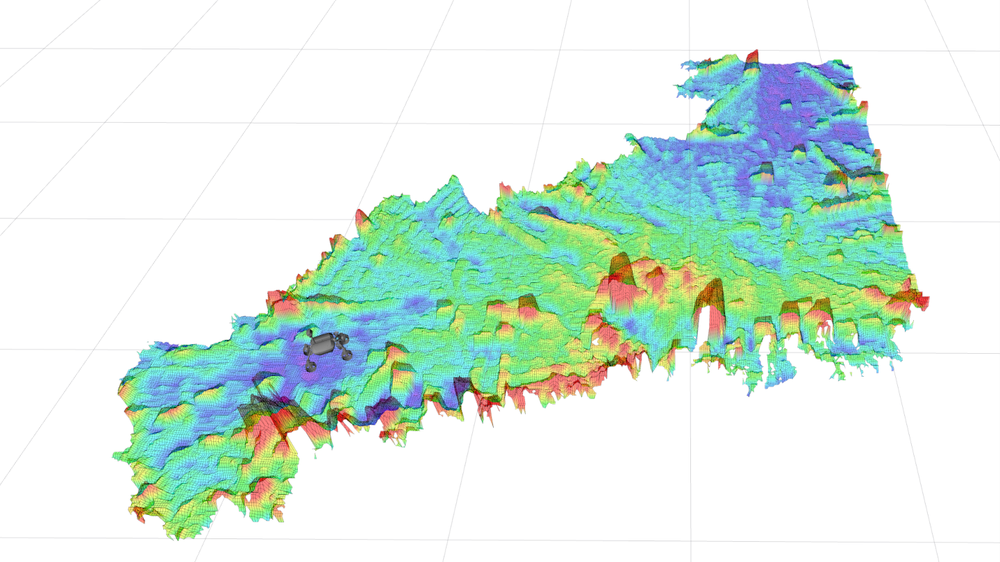
Cost map example
Ein Beispiel für eine 2,5D-Kostenkarte aus unseren Datensätzen. Die Kostenkarten repräsentieren die Befahrbarkeitskosten für einen planetaren Rover in einer unstrukturierten planeten-analogen Umgebung. Unter Verwendung dieser Kostenkarten können auch binäre Hinderniskarten erzeugt werden. Erstellungsdatum: September 2022
All datasets on this page are copyright by us and published under the CC BY-SA 4.0 license (Creative Commons Attribution-ShareAlike 4.0 International License). This means that you must credit the authors in the manner specified above and you may distribute the resulting work only under the same license.
Publication
Vayugundla, Mallikarjuna and Kuhne, Moritz and Wedler, Armin and Triebel, Rudolph, Datasets and Benchmarking of a path planning pipeline for planetary rovers, 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop: Evaluating Motion Planning Performance, 23-27 Oct 2022, Kyoto, Japan. [elib]


{kind=link}