Wir präsentieren Datensätze mit 2,5D-Höhenkarten einer planetaren Umgebung, die während der weltraumanalogen ARCHES-Mission auf dem Ätna gesammelt wurden. Zusätzlich zu den rohen Erhebungskarten stellen wir Kostenkarten zur Verfügung, welche die Befahrbarkeit des Geländes kodieren.
Diese Datensätze sollen zum Benchmarking von Pfadplanungsalgorithmen in einer unstrukturierten planeten-analogen Umgebung für mobile Roboter verwendet werden.
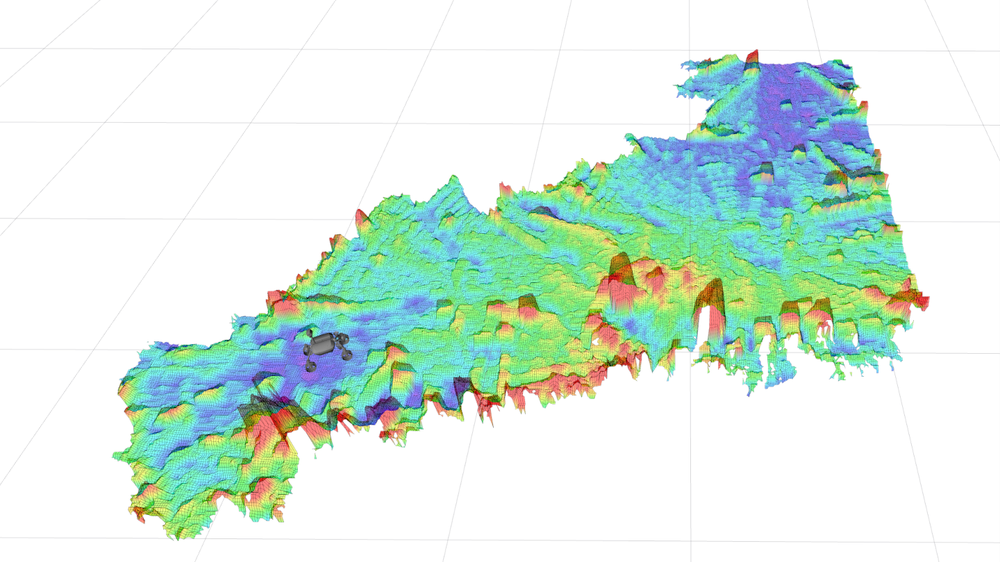
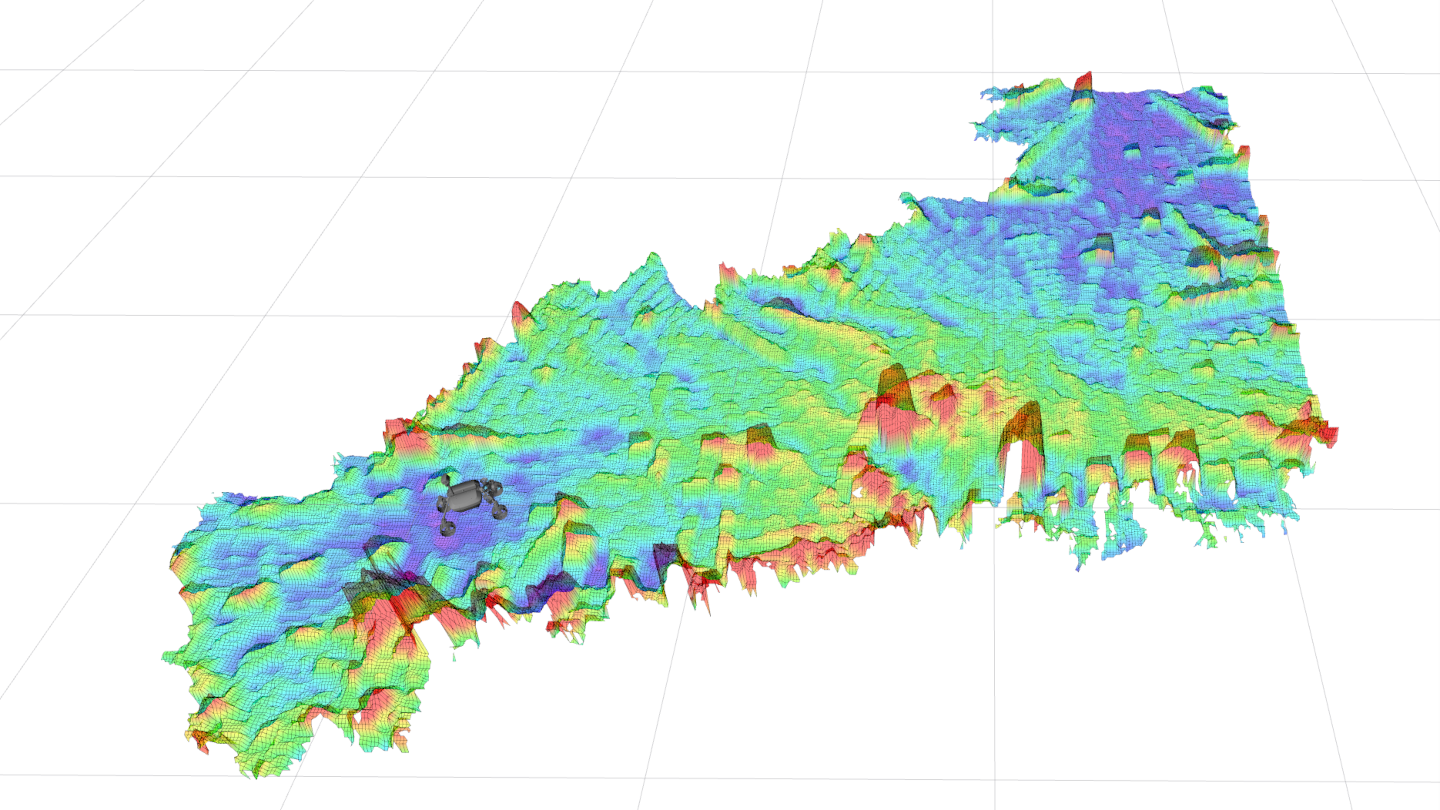
Beispielhafte Kostenkarte
Ein Beispiel für eine 2,5D-Kostenkarte aus unseren Datensätzen. Die Kostenkarten repräsentieren die Befahrbarkeitskosten für einen planetaren Rover in einer unstrukturierten planeten-analogen Umgebung. Unter Verwendung dieser Kostenkarten können auch binäre Hinderniskarten erzeugt werden. Erstellungsdatum: September 2022
Alle Datensätze sind urheberrechtlich geschützt und unter der Lizenz CC BY-SA 4.0 (Creative Commons Attribution-ShareAlike 4.0 International License) veröffentlicht. Dies bedeutet, dass Sie die Autoren in der oben angegebenen Weise angeben müssen und die resultierende Arbeit nur unter derselben Lizenz verbreiten dürfen.
Publikation
Vayugundla, Mallikarjuna and Kuhne, Moritz and Wedler, Armin and Triebel, Rudolph, Datasets and Benchmarking of a path planning pipeline for planetary rovers, 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop: Evaluating Motion Planning Performance, 23-27 Oct 2022, Kyoto, Japan. [elib]


{kind=link}