
AugmentedAutoencoder
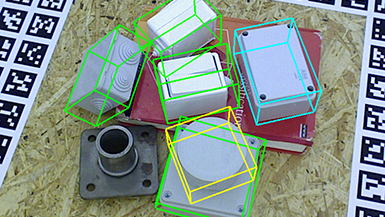

6DOF object pose estimation is essential for autonomous robotic manipulation, augmented reality applications, autonomous driving. Augmented Autoencoders (AAEs) are an approach developed at the institute to train neural networks for object pose estimation on synthetically rendered images from 3D models. It allows the learning of complex features for pose estimation without the need to annotate images with object poses. A domain randomization strategy during the training ensures the transferability to real sensor data. Unlike many other approaches, no direct mapping of images to poses is learned, so the approach can handle object symmetries.
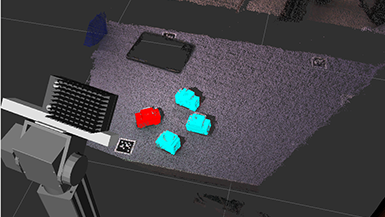
Initially a deep learning based object detection is performed (RetinaNet). If depth data is available, this approach can initialize an Iterative Closest Point (ICP) to determine not only robust but also very precise object positions.
At the European Conference on Computer Vision (ECCV) 2018 the publication received the Best Paper Award.
The code is available Open Source on Github: https://github.com/DLR-RM/AugmentedAutoencoder.