
AugmentedAutoencoder

6-DOF-Objekt-Lageschätzung ist essentiell für autonome robotische Manipulation, Augmented-Reality-Anwendungen, autonomes Fahren, etc.
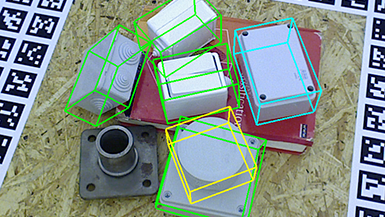
Augmented Autoencoders (AAEs) sind ein am Institut entwickelter Ansatz, um neuronale Netze zur Objekt-Lageschätzung mit synthetischen gerenderten Bildern von 3D-Modellen zu trainieren. Er erlaubt das Lernen komplexer Features zur Lageschätzung ohne das aufwendige Annotieren von Bildern mit Objektposen. Durch eine Domain-Randomization-Strategie während des Trainings wird die Übertragbarkeit auf echte Sensordaten sichergestellt. Im Gegensatz zu vielen anderen Ansätzen wird kein direktes Mapping von Bildern zu Posen gelernt, wodurch der Ansatz mit Objektsymmetrien umgehen kann.
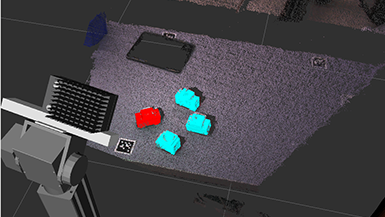
Initial wird eine auf Deep Learning basierte Objekt-Detektion durchgeführt (RetinaNet). Falls Tiefendaten zur Verfügung stehen, kann dieser Ansatz einen Iterative Closest Point (ICP) intialisieren, um nicht nur robuste, sondern auch sehr präzise Objektlagen zu bestimmen.
Bei der European Conference on Computer Vision (ECCV) 2018 erhielt die Publikation den Best Paper Award.
Der Code ist Open Source auf GitHub verfügbar: https://github.com/DLR-RM/AugmentedAutoencoder.