
3D-Modeler 1 (2001)
Housing Concept
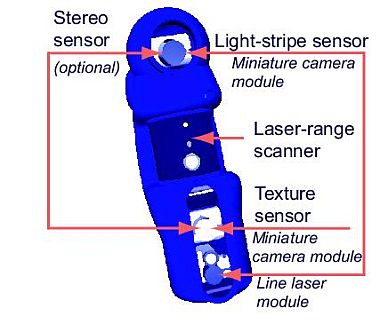
Currently, the Multisensory 3D-Modeller integrates the laser-range scanner, a texture sensor (calibrated CCD miniature head camera), a laser-stripe sensor, using another camera in combination with a line laser module (opening angle 60°, 635nm wavelength) and a stereo vision sensor.
These different sensors are integrated into a specially developed housing which is of low weight and easy to handle.

The 6D pose (position and orientation) of the housing is tracked by an external system. Thus, all sensors can be calibrated to the same global frame. This allows for comparing and combining the data of the different sensors. A "Converter" PC is used, to read the pose requests from the CAN bus, the 6D pose data from the tracking system, and send it back on the CAN bus. This is necessary, because every tracking system offers a different interface. Two different devices for pose measurement are realized. In the following they are explained in detail.
Pose Measurement
The FARO Arm
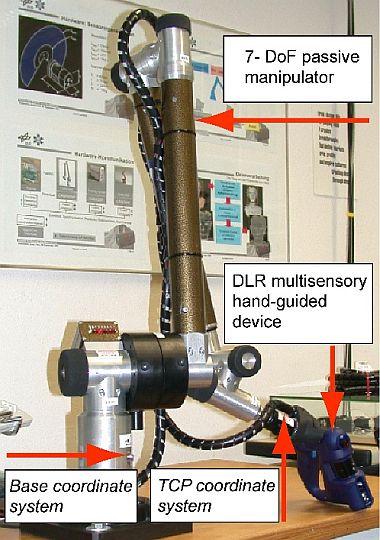
The device from FARO is a 7DoF passive Manipulator. Normally, it is used to measure objects tactile, i.e. a tip mounted onto the arms TCP is moved over the objects surface.
In our application the scanner is mounted onto the arm, instead of a tip. The pose data can be read by serial connection from the arm. The advantage of the arm is high measurement accuracy (~0.1mm). Unfortunately, the system offers only a small work space and is not easy to move, because of the weight of the arm.
ART IR-Optical Tracking System
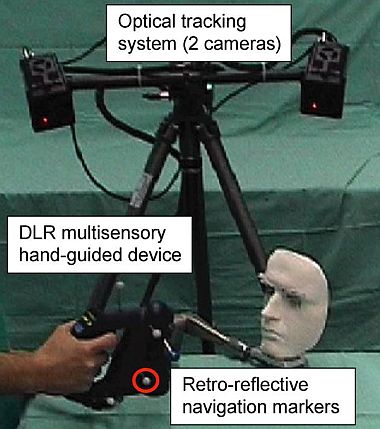
The smARTtrack1 is a real time IR-optical tracking system. It consists of a stereo camera system, connected with a PC by Ethernet. The system can track special infrared retro-reflecting markers and determine their 3D positions. It is also able to track rigid marker combinations and calculate 6D poses. The cycle time of the system is configurable with a maximum of 20msec. In the scanner application the markers are mounted onto the housing.
In spite of the FARO arm, this system has a larger workspace and the scanner is very light and easier to handle. But the system is less accurate (<1mm) and so the measured models are less detailed.

{kind=link}