
M-Runners

The project M-Runners is part of the ERC Advanced Grant 2018 with focus on Modal Nonlinear Resonance for Efficient and Versatile Legged Locomotion. ERC grants are awarded through open competition to projects headed by starting and established researchers, irrespective of their origins, who are working or moving to work in Europe.
Runtime: | 2019-06-04 to 2024-11-30 |
Project partners: | |
Fields of application: | Energy-efficient, elastic robots |
Funding: | Horizon 2020, ERC, funding no 835284, M-Runners |
Project details
The goal of the project is to increase understanding of the fundamental principles of leg-based motion so that four- and two-legged robots can be developed that exhibit similar movement characteristics in terms of versatility and efficiency as their biological counterparts.
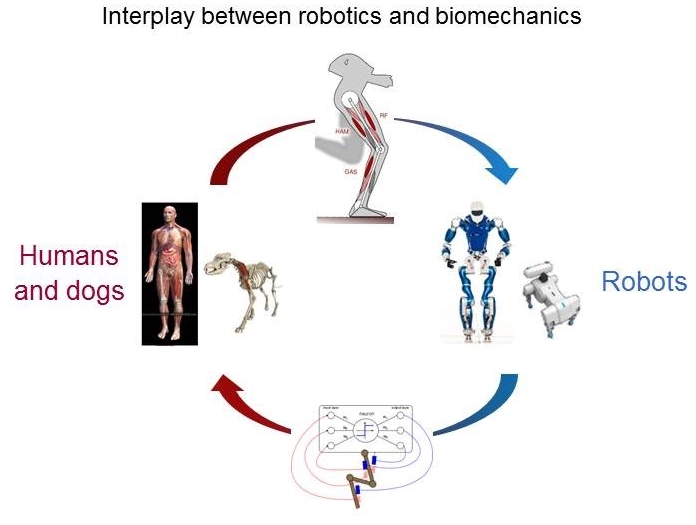
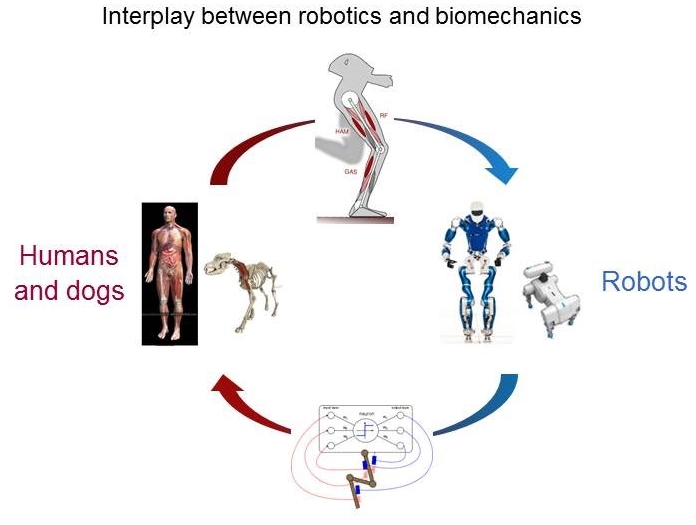
The central hypothesis of the research project is that biological locomotion is fundamentally determined by the biomechanical resonance properties of the respective body, and that a scientific breakthrough in robotic locomotion essentially depends on the understanding and use of these phenomena. When the body is designed so that walking and running correspond to intrinsic periodic movements of the system, control becomes simple. Robustness and energy efficiency are then the natural consequences. However, we are lacking the mathematical methods today for the description, analysis, design and control of nonlinear resonances and elastically resonant robots. Therefore, the project’s primary goal is the design of a new theory of nonlinear oscillations that can be applied to elastic multi-body systems, both biological and robotic.
The M-Runners project conducts interdisciplinary research at the interface between robotics, nonlinear dynamic systems, biomechanics, neuroscience and artificial intelligence (AI). We will take inspiration from biology regarding the basic motion sequences and the muscle arrangements (couplings, redundancies, compliance distributions). Conversely, we expect our theory to generate new hypotheses for a deeper understanding of locomotion biomechanics and its control by the nervous system. We will design and demonstrate robots which can move at similar speed and mechanical energetic efficiency as animals and humans and which have comparable uneven terrain versatility and robustness. The primary application scenario is space exploration on Mars in canyons, caves or steep ridge slopes. However, potential areas of application extend from the health sector via assistance robotics to use in disaster areas.
The ERC Advanced Grants are awarded to outstanding researchers with excellent scientific achievements and particularly significant and original research results. As principal investigators, they conduct research projects that are carried out in a public or private research institution in one of the EU member states or associated countries.
{kind=link}
- Alin Albu-Schäffer, Cosimo Della Santina, "A review on nonlinear modes in conservative mechanical systems", in Annual Reviews in Control, vol. 50, pp 49-71, 2020 [elib]
- Davide Calzolari, Cosimo Della Santina, Alin Albu-Schaffer, "Exponential Convergence Rates of Nonlinear Mechanical Systems: The 1-DoF Case With Configuration-Dependent Inertia", in IEEE Control Systems Letters, vol. 5, no. 2, pp. 445-450, April 2021 [elib]
- Davide Calzolari, Cosimo Della Santina, Alin Albu-Schaffer, "PD-like Regulation of Mechanical Systems with Prescribed Bounds of Exponential Stability: the Point-to-Point Case", in IEEE Control Systems Letters, December 2020, doi: 10.1109/LCSYS.2020.3046538.
- Cosimo Della Santina, Alin Albu-Schaeffer, "Exciting efficient oscillations in nonlinear mechanical systems through Eigenmanifold stabilization", in IEEE Control Systems Letters, December 2020, [elib]
- Matthias Kohler, Philipp Stratmann, Florian Röhrbein, Alois Knoll, Alin Albu-Schäffer, Henrik Jörntell, "Biological data questions the support of the self inhibition required for pattern generation in the half center model", in PLoS ONE, vol. 15, no. 9, September 2020 [elib]
- Daniel Seidel, Milan Hermann, Thomas Gumpert, Florian C. Loeffl, Alin Albu-Schaffer, "Using Elastically Actuated Legged Robots in Rough Terrain: Experiments with DLR Quadruped bert", 2020 IEEE Aerospace Conference, Big Sky, USA, March 2020, pp. 1-8 [elib]
- Davide Calzolari, Alessandro Massimo Giordano, Alin Albu-Schaffer, "Error Bounds for PD-Controlled Mechanical Systems Under Bounded Disturbances Using Interval Arithmetic", in IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 1231-1238, April 2020 [elib]
- Dominic Lakatos, Yuri Federigi, Thomas Gumpert, Bernd Henze, Milan Hermann, Florian Loeffl, Florian Schmidt, Daniel Seidel, Alin Albu-Schaffer, "A Coordinate-based Approach for Static Balancing and Walking Control of Compliantly Actuated Legged Robots", 2019 International Conference on Robotics and Automation (ICRA), Montreal, Canada, May 2019, pp. 9509-9515 [elib]