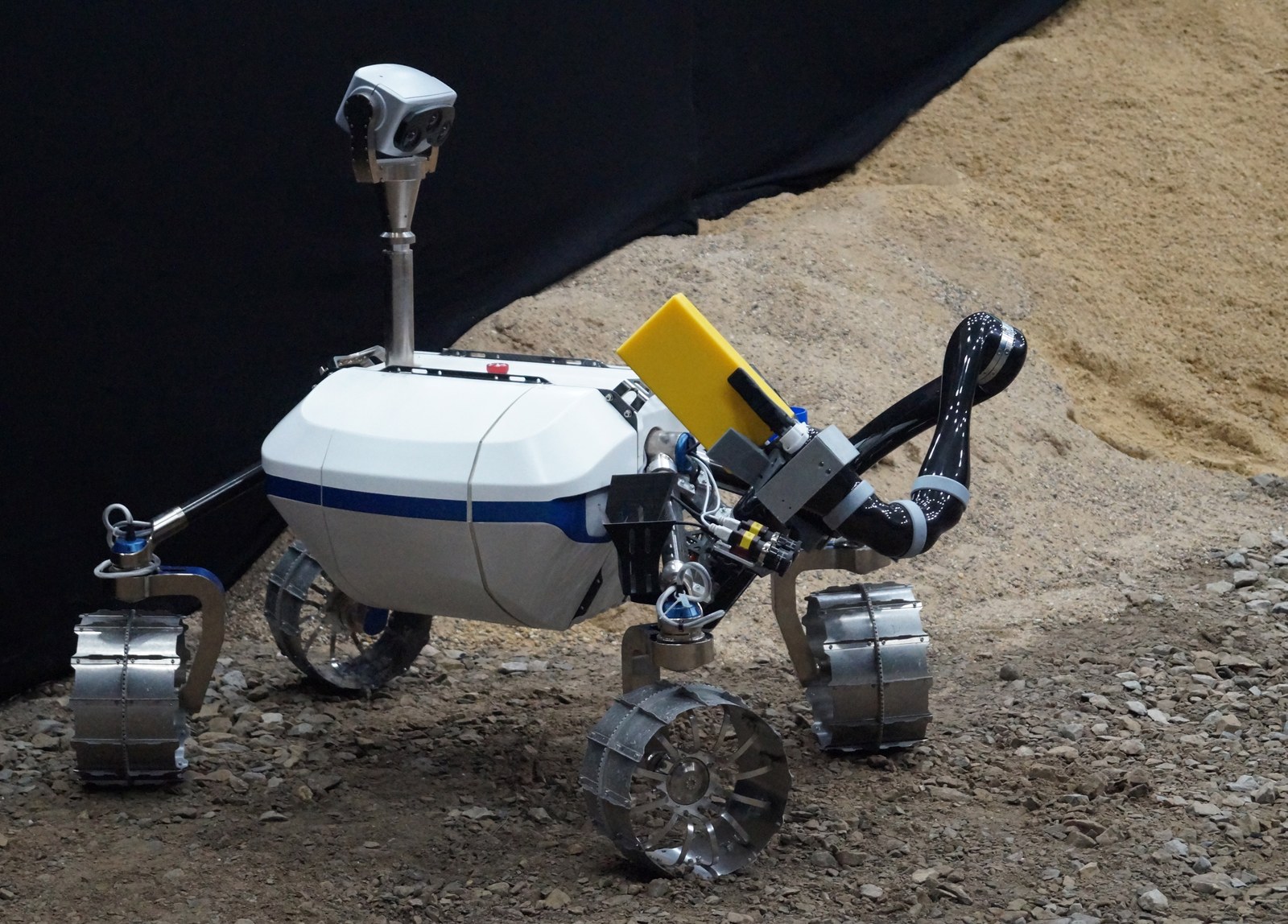
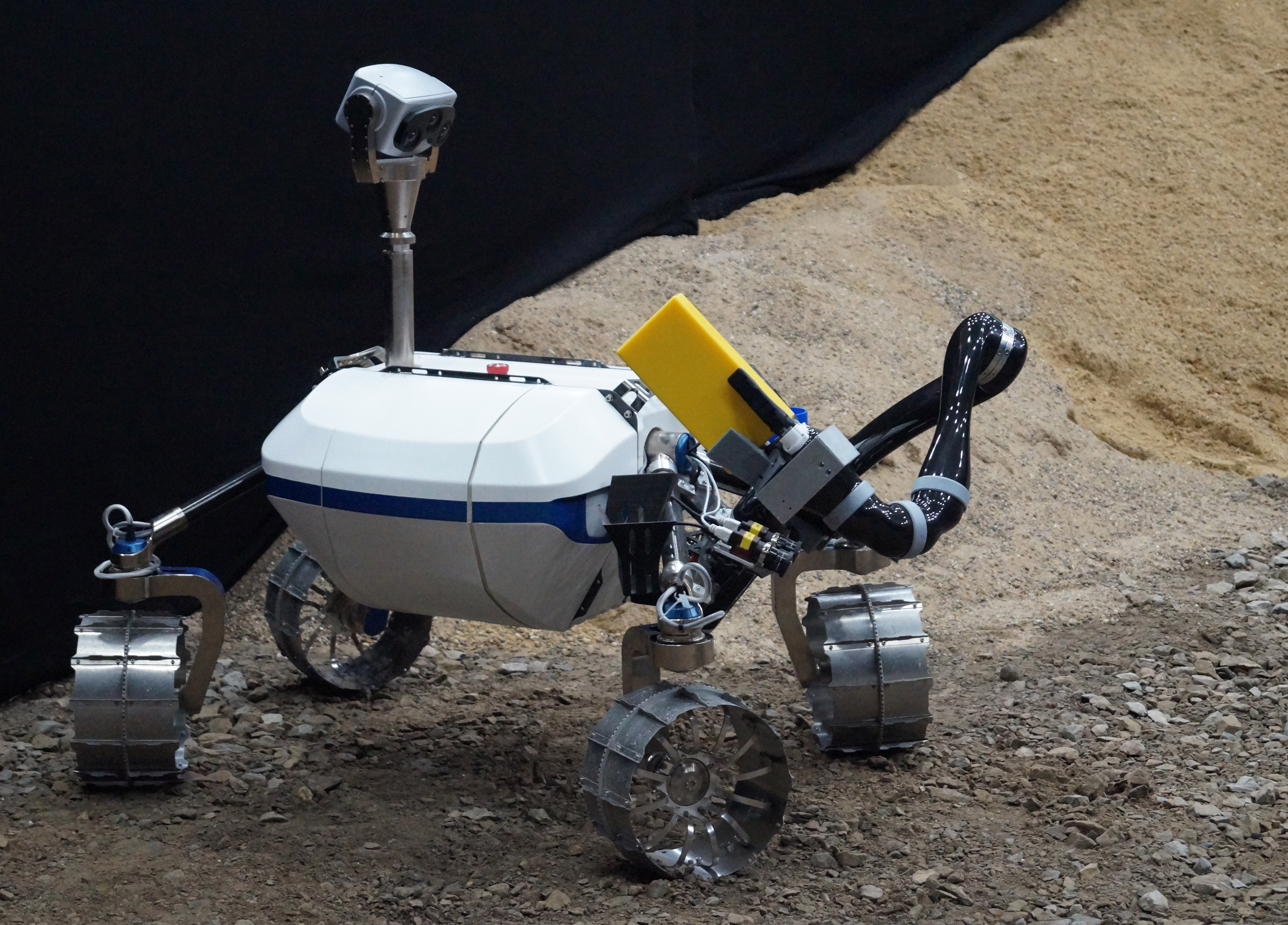
The Lightweight Rover Unit (LRU) is the prototype of a mobile robot for exploration of unknown, impassable and hard to access terrain. The research work on semi-autonomy serves as preparation for future planetary exploration missions and terrestrial disaster operations. In 2014 the LRU was presented in public for the first time.
Technical Data
Size:
114 cm × 74 cm × 94 cm
Weight:
approx. 30 kg
Degrees of freedom:
12, divided among
4 wheel actuators
4 steering actuators
2 series-elastic joints
2 joints in the pan-tilt unit (camera)
Nominal payload:
5 kg
Energy supply:
Two battery packs (28.8 V / 5 Ah), > 60 min operating time per battery pack
Speed:
1,11 m/s or 4 km/h
User Interfaces:
Direct remote control via gamepad and other interfaces
Autonomous waypoint navigation to manually entered destinations
Features:
Pan-tilt unit with a black and white stereo camera and a color camera
Balance sensor (IMU)
FPGA-based stereo vision with 15Hz (SGM)
6D location estimation and 3D mapping of unknown environments (mapping)
Automatic path planning, obstacle avoidance and terrain classification
System description
The LRU combines several of the latest technologies developed at the Institute of Robotics and Mechatronics such as the drive and joint units, the motors of which were already proven in outer space use for five years on the International Space Station in the ROKVISS experiment. A stereo camera and multi-award winning Semi-Global-Matching stereo vision (SGM) enable the robot to perceive its surroundings in three dimensions. From this, the Rover calculates maps of the environment and then autonomously steers towards predefined targets in unknown and uneven terrain. This independent navigation is essential, since signals from the earth require several seconds or minutes making direct remote control difficult. The enhancement of the LRU with a robotic arm mounted on the system allows it to manipulate known and unknown objects. In 2015, the LRU took part in the SpaceBot Camp of the DLR Space Administration.
During the ROBEX demo mission space campaign that took place during June–July 2017 on Mt. Etna, Italy, we performed some Long Range Navigation Tests with the LRU.
During the ROBEX demo mission space campaign that took place during June–July 2017 on Mt. Etna, Italy, we performed some Long Range Navigation Tests with the LRU.





{kind=link}
{kind=link}
{kind=link}
{kind=link}