
Mission Planning and Validation

{kind=link}
During the last decade, Unmanned Aerial Vehicles (UAVs) have become increasingly relevant in diverse application fields, both in the military and civil segments. Consequently, UAV research has been widely held. A significant part of the efforts have been spent on the UAV autonomy. At the moment, UAVs are able of carrying out on their pre-planned mission. However, human supervision is still needed, especially in highly dynamic environments.
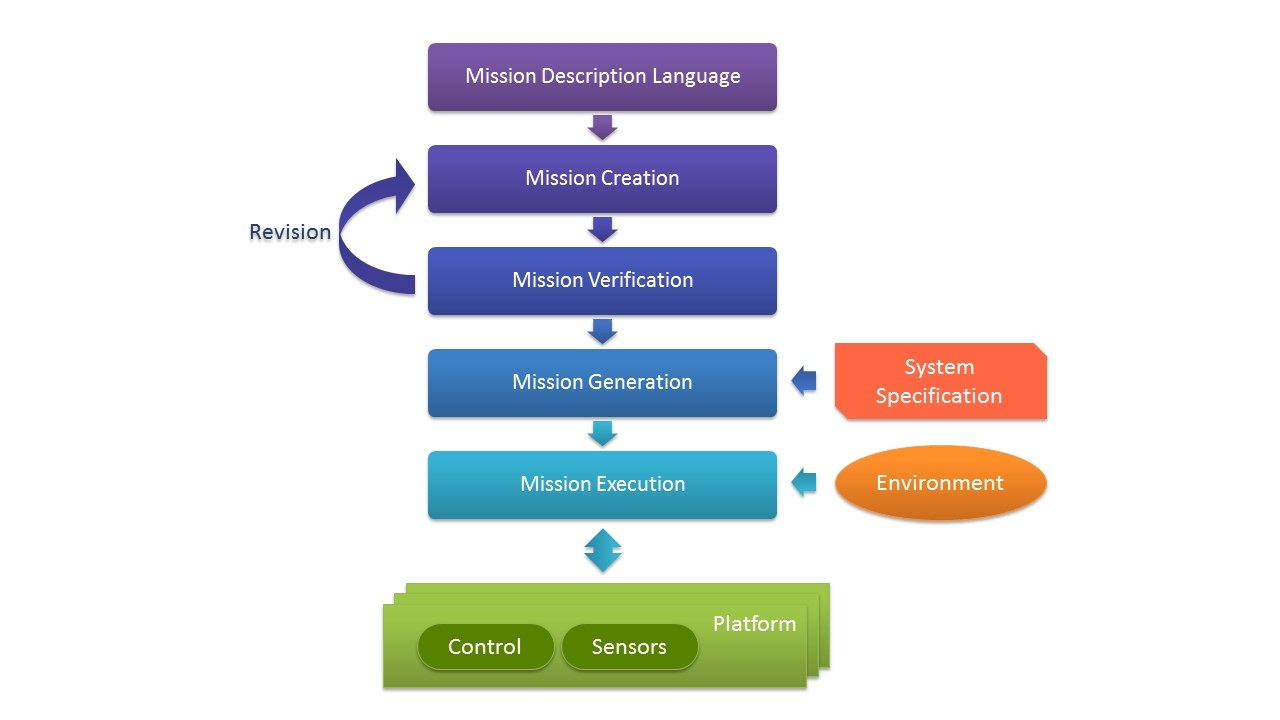
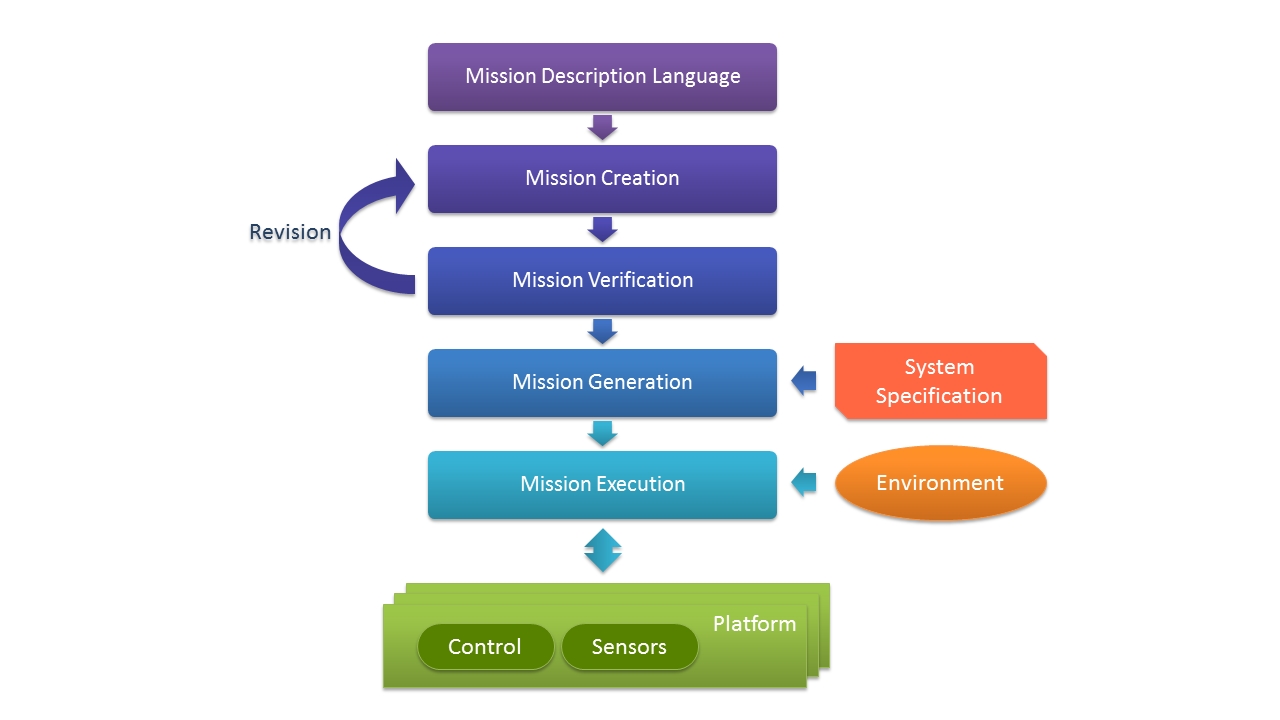
For this reason, the analysis of the execution plans in terms of their correctness and errorless is imperative. Through the description and specification of the basic elements of the execution plans (like states, events and actions), it is possible to build a logic formalism or statements for the missions (relationships among these basic elements) which could be verifiable. Having a mission description language, the user is capable of building a mission which can be verified against the formalism. In this manner, the errors made during the building of a mission could be detected.
This automatic check of the mission integrity could be complemented with an automatic generation of the software implementation needed for the mission execution with a specific system or platform.
Furthermore, this methodology reduces the complexity of the system because it is possible to apply the programming good practices and to create tools for the mission creation, verification and generation. Therefore in an easy way, the missions could be generalizable and reusable for different systems.
Finally, an autonomous mission management system should be capable of taking into account the UAV capabilities and status, the environment information and the target information during the mission execution.