
Missionsplanung und Valdierung

{kind=link}
Im letzten Jahrzehnt hat der Einfluss unbemannter Fluggeräte (Unmanned Aerial Vehicle, UAV) in verschiedenen Anwendungsfeldern sowohl im militärischen als auch zivilen Bereich erheblich zugenommen. Dementsprechend haben auch die Forschungen auf diesem Gebiet deutlich zugenommen. Ein beträchtlicher Anteil der Forschungsprojekte beschäftigt sich mit dem Thema „Autonomie von UAV“. Zurzeit können viele UAV lediglich ihre vorgeplanten Missionen abfliegen. Allerdings muss besonders in hoch dynamischen Situationen immer noch ein Mensch die Missionsdurchführung überwachen.
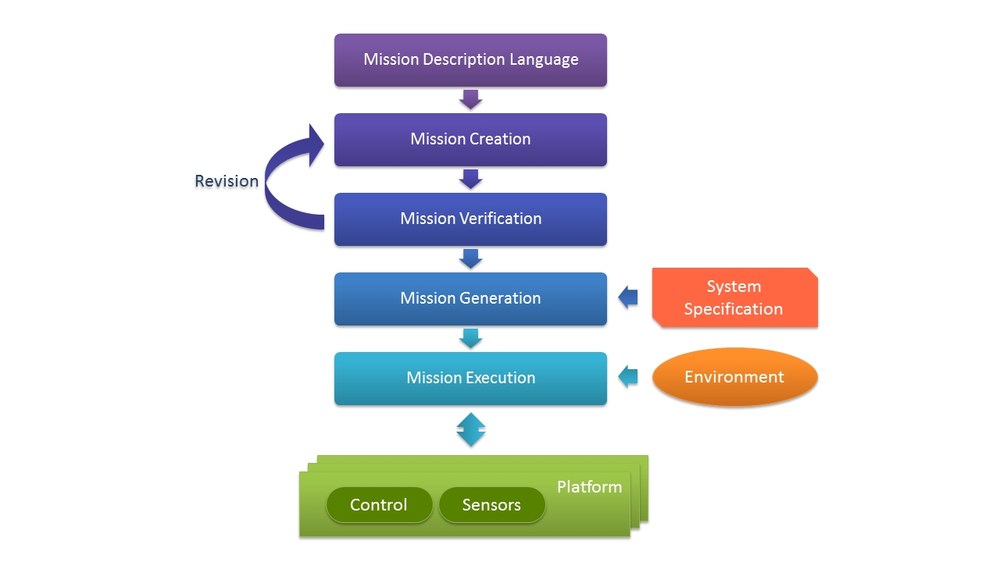
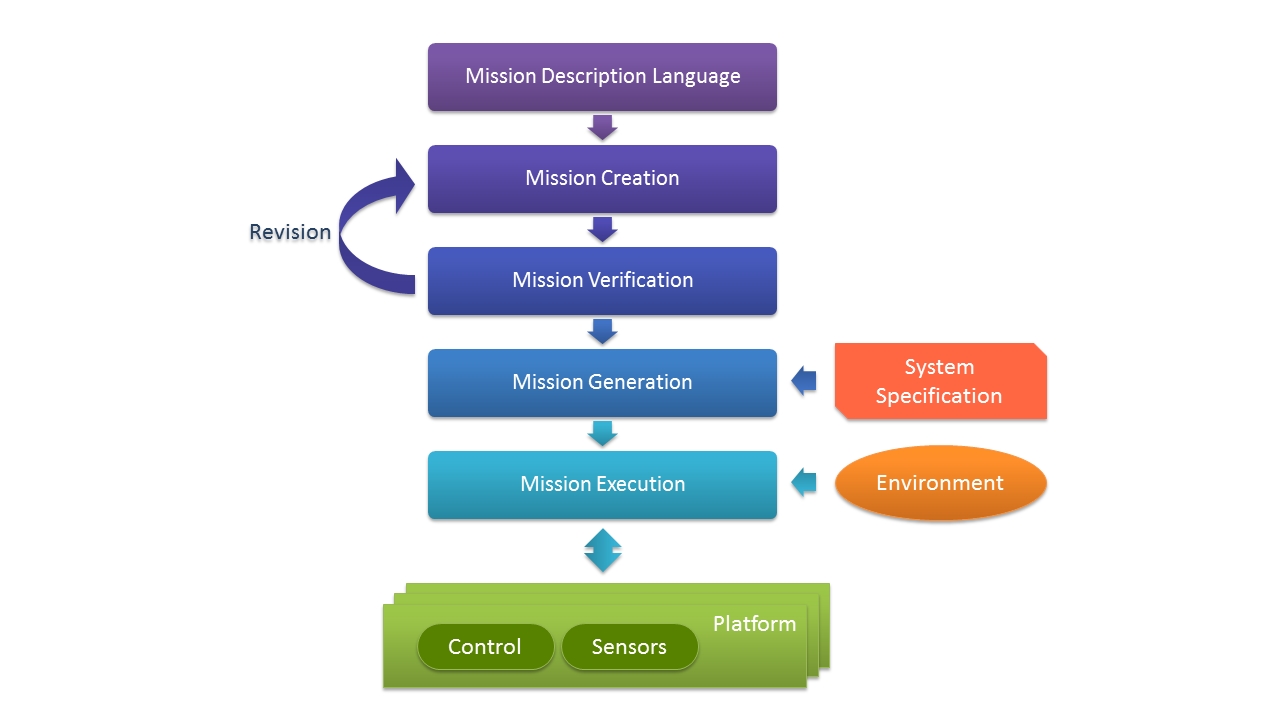
Daher ist die Analyse der Durchführungspläne im Hinblick auf deren Korrektheit und Fehlerfreiheit unabdingbar. Durch die Beschreibung und Spezifizierung der Grundelemente eines Durchführungsplans (wie Zustände, Ereignisse und Maßnahmen) können logische Formalismen oder Anweisungen für die Missionen (Beziehungen zwischen diesen Grundelementen) aufgestellt werden, die überprüfbar sind. Mit einer Beschreibungssprache für eine solche Mission kann der User eine Mission entwickeln, die sich mit dem Formalismus abgleichen lässt. So könnten bei der Entwicklung der Mission gemachte Fehler erkannt werden.
Diese automatische Prüfung der Fehlerfreiheit einer Mission könnte ergänzt werden durch eine automatische Erzeugung der für die Durchführung mit einem bestimmten System erforderliche Softwareimplementierung.
Des Weiteren reduziert diese Methodik die Komplexität des Systems, weil die Good Practices der Programmierung angewendet und Tools für die Entwicklung, Verifizierung und Erzeugung der Mission entwickelt werden können. Daher könnten die Missionen auf einfache Art und Weise generalisiert und für verschiedene Systeme wiederverwendbar angelegt werden.
Und schließlich sollte ein autonomes Missionsmanagementsystem in der Lage sein, bei der Ausführung der Mission die Fähigkeiten und Zustände des UAV sowie Informationen über Umgebung und Ziel zu berücksichtigen.