
Analogue-1: Study in renowned Science Robotics Journal
In a study, scientists Michael Panzirsch, Aaron Pereira and Harsimran Singh explain the Institute's contribution to a space experiment in the renowned Science Robotics Journal. The scientific publication is entitled "Exploring Planet Geology through Force-Feedback Tele-Manipulation from Orbit" and deals with a control approach developed by the telerobotics group at the Institute of Robotics and Mechatronics for the remote control of a robotic arm. This approach made it possible to control all six Cartesian robot degrees of freedom with force feedback despite a comparatively high time delay. This control approach was extended for the Analog-1 mission so that it enables even more dynamic motion control and at the same time allows the robot to interact safely with its environment. This allows tasks on earth or in space to be carried out quickly yet safely. In addition to space applications, this is also highly relevant, for example, in the application of telerobotics in the context of care assistance on Earth (DLR project SMiLE).
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
In the published space study, the technology was tested as part of the ESA-ISS telerobotics experiment Analog-1. On 15 November 2019, astronaut Luca Parmitano piloted ESA's Interact rover in a test site in Valkenburg, the Netherlands, which simulated an exploration scenario on the moon. There it successfully collected rock samples with a robotic arm under the guidance of a team of geologists. This was the first time such a complex robot had been remotely controlled from space using force feedback. Due to the high communication delay between the orbiter and the planet's surface, which impairs the operator's perception of collisions or prediction of impending collisions, a control approach had to be developed to guarantee the safety of the robot hardware and environment under these conditions.
A week earlier, on 18 November 2019, Luca Parmitano tested the remote control of the rover and the robotic arm during his "proficiency run". In this experiment, a human was able to control a robot on Earth from the ISS in all directions for the first time and perceive the forces that the robot feels.
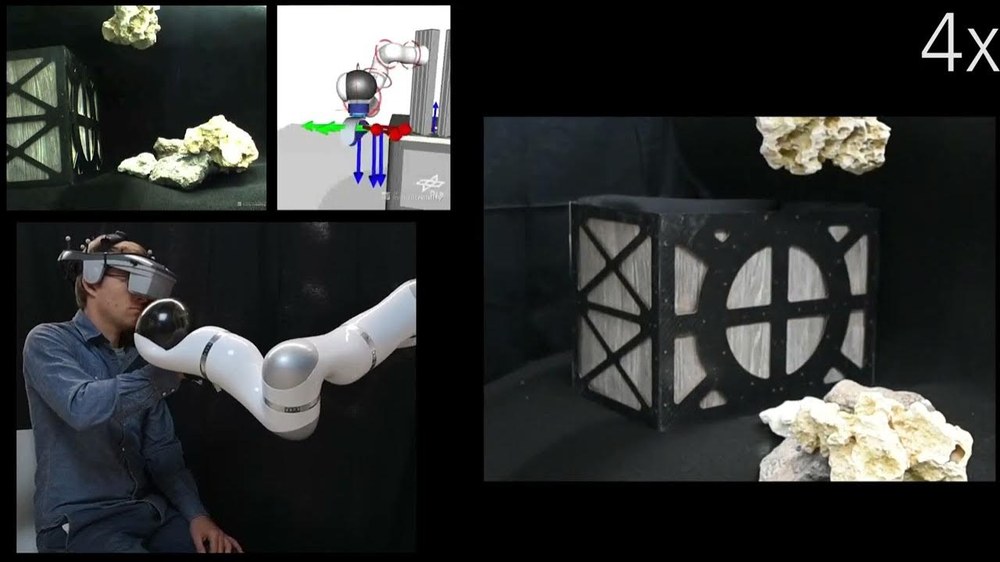
With the help of this force feedback, the astronaut can intuitively control the robot's interaction forces and thus also perform delicate tasks. DLR scientist Harsimran Singh explains: "DLR's control approach ensures that the robot does not apply any forces to the environment before the astronaut has made contact via the force feedback. This is crucial for the safety of the robot's interaction with its environment, especially when there is a long time delay."
Teleoperation technology is already complex on Earth, but there are additional challenges in space, explains Michael Panzirsch: "On the one hand, force feedback coupling is impaired by very high and variable time delays of 800 ms on average, data packet loss or even communication interruptions. Secondly, the astronaut is in microgravity, which can lead to losses in sensorimotor function and thus potentially make teleoperation more difficult."
The Analog-1 experiment is the final link in a chain of experiments called METERON, a collaboration between DLR and ESA, which is coordinated by DLR Project Manager Dr Neal Lii at DLR RM. Among other things, METERON is investigating how intelligent robots on planetary surfaces can be controlled by astronauts in orbit.
As early as 2017 and 2018, astronauts such as Alexander Gerst controlled the humanoid robot Justin in the DLR robotics laboratory from the ISS in a clearly structured environment via a tablet interface. Should robots explore the moon or Mars in the future, or build or maintain infrastructure there, astronauts could expand the capabilities of autonomous robots from a space station using teleoperation technology.
"Even if this type of experiment looks simple, the technical complexity (human-robot interaction) under the conditions on the space station requires the collaboration of many experts," says Thomas Krüger, Head of the Human Robot Interaction Laboratory at ESA. "We are very happy about the cooperation with DLR and hope to continue this in the future and on further missions."
The issue of Science Robotics featuring the DLR scientists' study will be available from mid-April.