IEEE Humanoids Conference: Award for "Best Interactive Paper"
December 13, 2022
IEEE Humanoids Conference: Award for "Best Interactive Paper"
Members of the Institute of Robotics and Mechatronics received a Best Interactive Paper Award at the IEEE-RAS International Conference on Humanoid Robots 2022, which took place from 28-30 November 2022 in Okinawa, Japan.
Presentation of the prize; from left: Kazuo Kiguchi, Abderrahmane Kheddar, Katsu Yamane, Konrad Fründ, Anton Shu, Nancy Pollard, Koh Hosoda, Tomomichi Sugihara
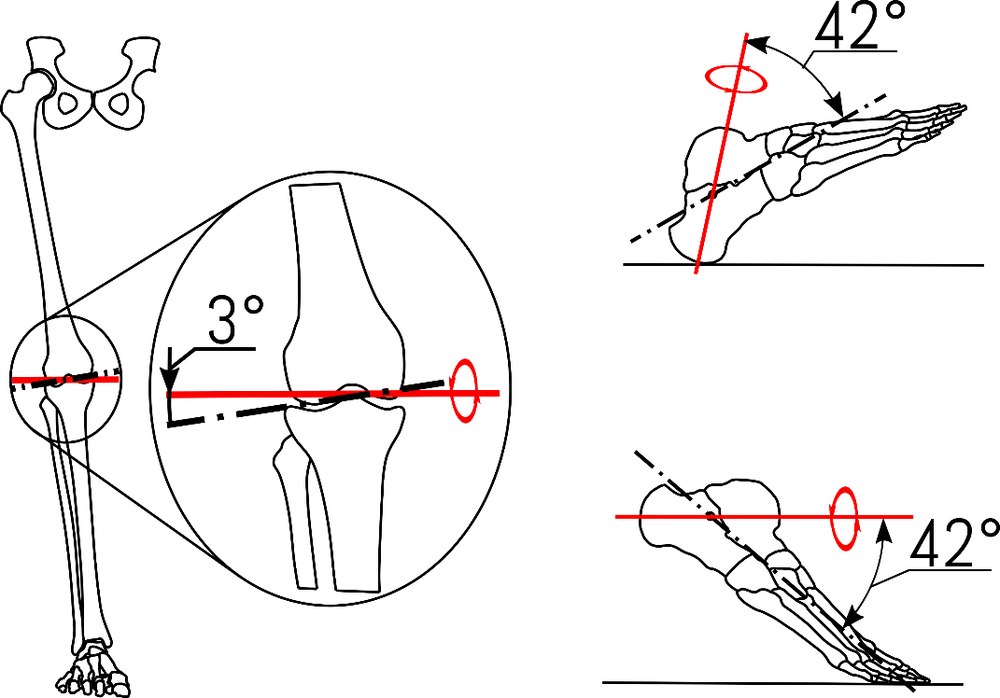
The paper: "A Guideline for Humanoid Leg Design with Oblique Axes for Bipedal Locomotion" by Konrad Fründ, Anton Shu, Florian Loeffl and Christian Ott evaluates the applicability of oblique joint axes for bipedal walking robots.
It was developed as part of the NatDyRel project (Utilising Natural Dynamics for Reliable Legged Locomotion), which aims to initiate a fundamental paradigm shift in the design and control of humanoid robots. The research project focuses on a new generation of intrinsically compliant robots that will be able to adapt their open-loop actuator impedance to the task in real time. Christian Ott has won an ERC Consolidator Grant, a project funding programme of the European Commission, for the project.
The renowned IEEE-RAS Humanoids conference focussed on all aspects of human-like robots. This year it took place in a hybrid concept.
Publication
Fründ, Konrad; Shu, Anton; Loeffl, Florian and Ott, Christian (2022) A Guideline for Humanoid Leg Design with Oblique Axes for Bipedal Locomotion. 2022 IEEE-RAS International Conference on Humanoid Robots, 28-30 Nov. 2022, Okinawa, Japan.
Contact us
Lioba Suchenwirth
Public Relations
Institute of Robotics and Mechatronics
Institute Development and Central Management
Münchener Straße 20, 82234 Oberpfaffenhofen-Weßling



{kind=link}
{kind=link}