The S3LI Vulcano dataset is a multi-modal dataset towards development and benchmarking of Simultaneous Localization and Mapping (SLAM) and place recognition algorithms that rely on visual and LiDAR modalities. Several sequences are recorded on the volcanic island of Vulcano, from the Aeolian Islands in Sicily, Italy. The sequences provide users with data from a variety of environments, textures and terrains, including basaltic or iron-rich rocks, geological formations from old lava channels, as well as dry vegetation and water. The data is accompanied by an open source toolkit providing tools for generating ground truth poses as well as preparation of labelled samples for place recognition tasks.
Riccardo Giubilato, Marcus Müller, Marco Sewtz, Laura Alejandra Encinar Gonzalez, John Folkesson, Rudolph Triebel, (2026) IEEE Aerospace Conference, "The S3LI Vulcano Dataset: A Dataset for Multi-Modal in Unstructured Planetary Environments"
s3li-etna
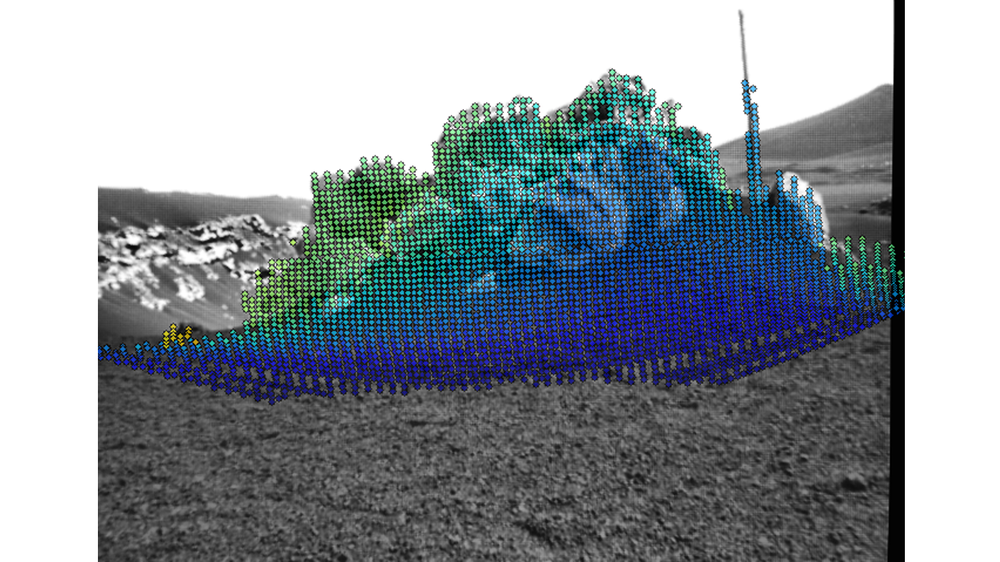
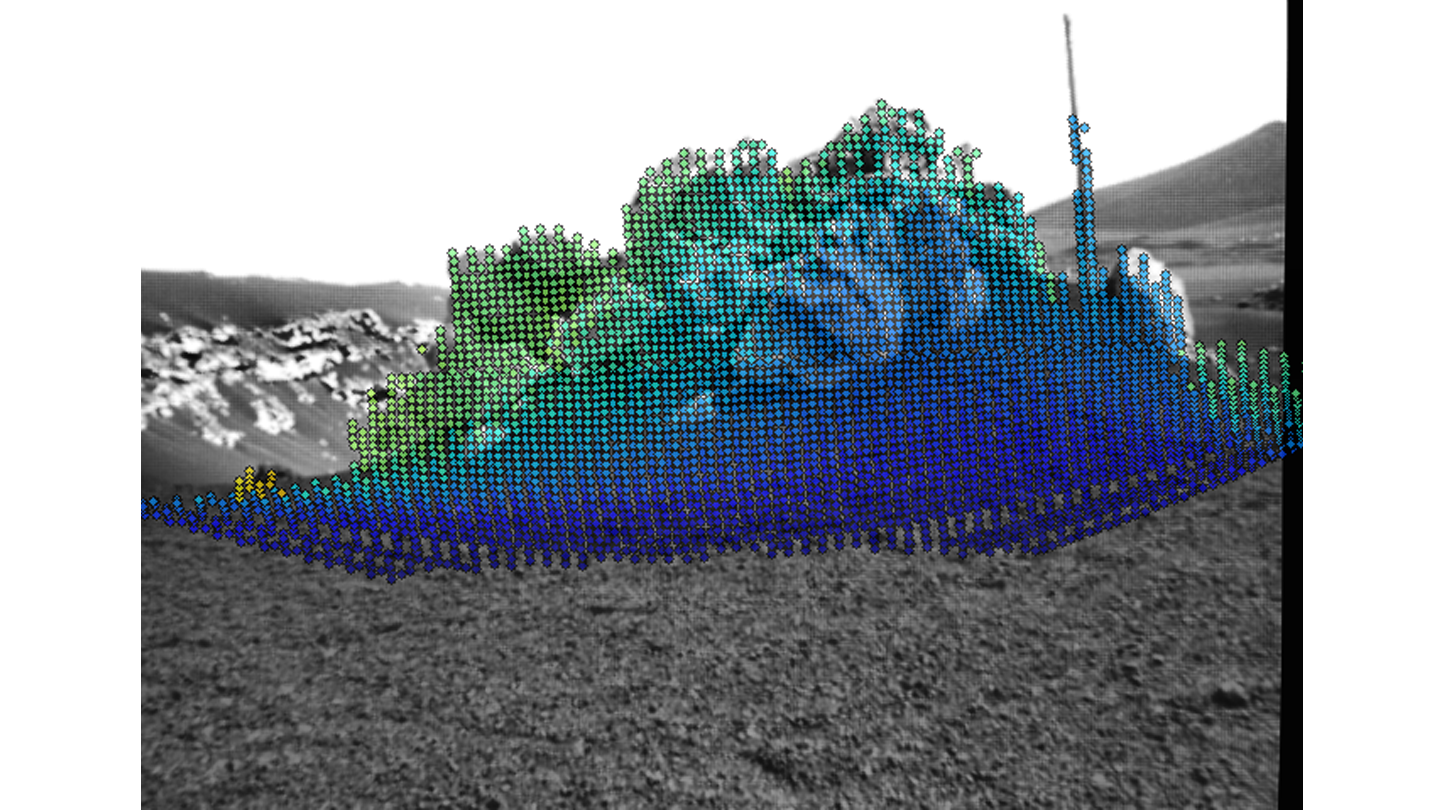
s3li-etna is a dataset recorded on the Moon-like environment of Mount Etna, Sicily, with a sensor setup that comprises a stereo camera, a LiDAR and an IMU. The dataset is intended to expose several factors that challenge visual- and LiDAR-based localization and mapping pipelines, when operating in severely unstructured environments. The harsh lighting conditions, combined with extreme visual aliasing, as well as the lack of salient structures, limit the possibility of performing place recognition through traditional approaches. Furthermore, the LiDAR sensor, employed in this dataset, is built relying on novel Solid-State technologies, that have promising characteristics for their implementation in space applications. The narrow Field-of-View (~70H x 30V) of the LiDAR, combined with the geometry of the landscape, does not allow to implement traditional LiDAR SLAM, and require to investigate the usage of the sensor as a complement to the visual inputs. This dataset offers 7 sequences, with peculiar characteristics in terms of type of trajectories and type of landscape, with accurate D-GNSS ground truth.
Sequences, ground truth and configuration files, are accessible at:
Riccardo Giubilato, Wolfgang Stürzl, Armin Wedler, Rudolph Triebel (2022) Challenges of SLAM in Extremely Unstructured Environments: The DLR Planetary Stereo, Solid-State LiDAR, Inertial Dataset. IEEE Robotics and Automation Letters, 7 (4), pp. 8721-8728. IEEE - Institute of Electrical and Electronics Engineers. doi: 10.1109/LRA.2022.3188118. ISSN 2377-3766. [elib]
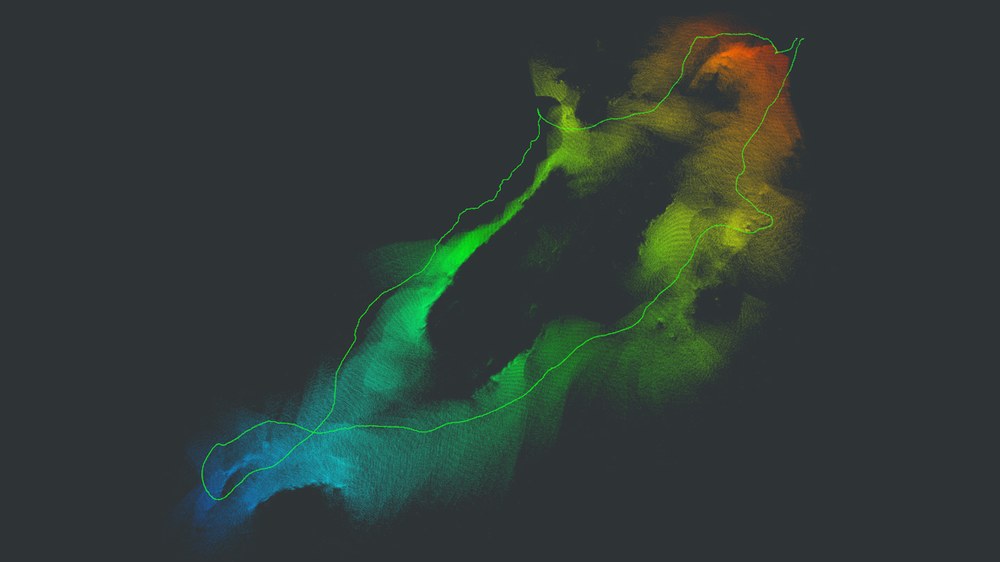
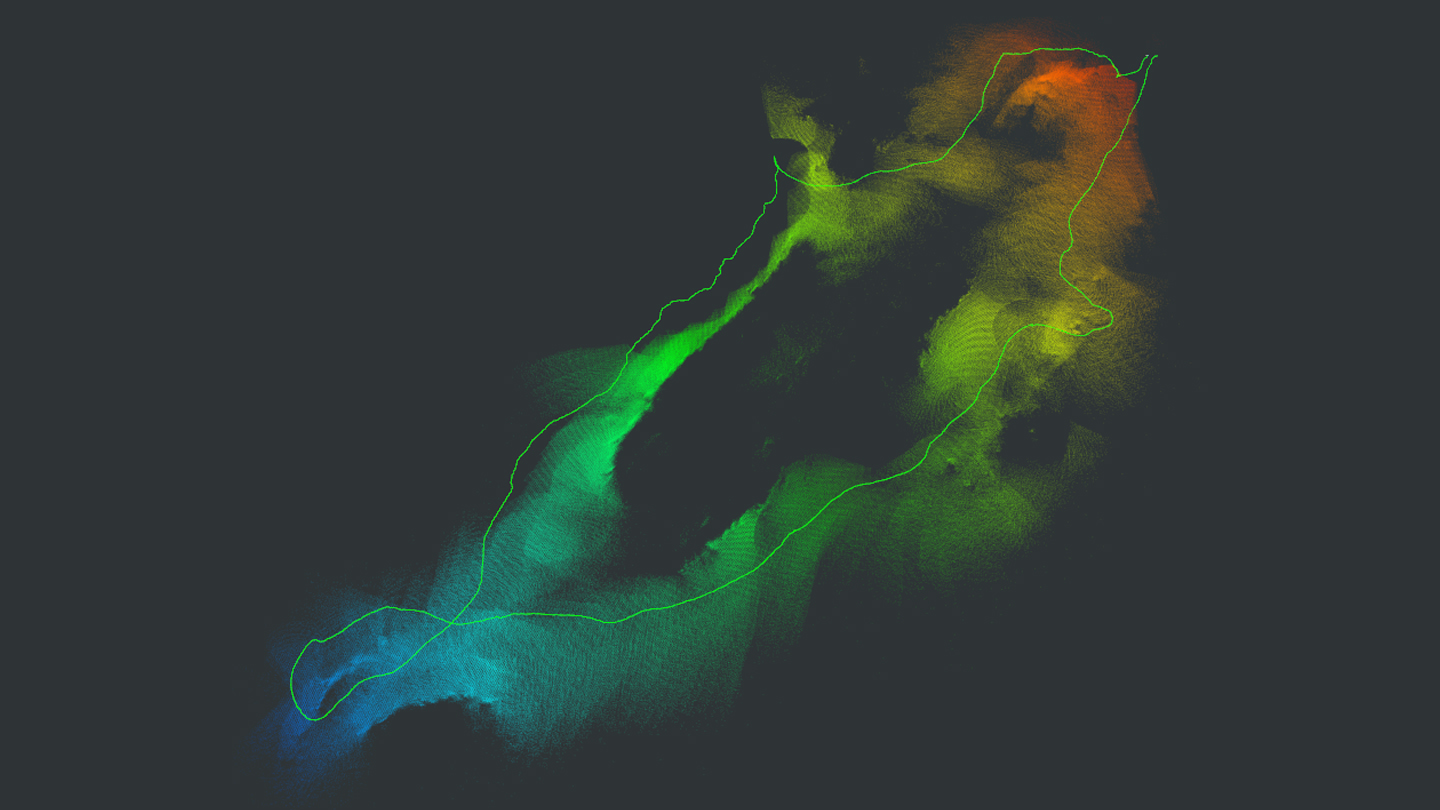
LiDAR Map
Karte, die durch das Stapeln von LiDAR-Scans bei gegebenen Posen der linken Kamera erstellt wurde, berechnet durch Visual-Inertial SLAM
Illustration of the stereo solid-state LiDAR inertial sensor setup, which includes 2 AVT monochrome cameras in stereo configuration, a Blickfeld Cube-1 LiDAR and an XSens IMU



{kind=link}
{kind=link}
{kind=link}