Das S3LI Vulcano-Dataset ist ein multimodaler Datensatz zur Entwicklung und Bewertung von Algorithmen für gleichzeitige Lokalisierung und Kartierung (SLAM) sowie für die Ortserkennung, die auf visuellen und LiDAR-Daten basieren. Mehrere Sequenzen wurden auf der vulkanischen Insel Vulcano aufgenommen, die zu den Äolischen Inseln in Sizilien, Italien, gehört. Die Sequenzen bieten den Nutzern Daten aus verschiedenen Umgebungen, Texturen und Geländen, einschließlich basaltischer oder eisenhaltiger Felsen, geologischer Formationen von alten Lavakanälen sowie trockener Vegetation und Wasser. Die Daten werden von einem Open-Source-Toolkit begleitet, das Werkzeuge zur Generierung von Ground-Truth-Lagen sowie zur Vorbereitung von gekennzeichneten Proben für Ortserkennungsaufgaben bietet.
Riccardo Giubilato, Marcus Müller, Marco Sewtz, Laura Alejandra Encinar Gonzalez, John Folkesson, Rudolph Triebel: "The S3LI Vulcano Dataset: A Dataset for Multi-Modal in Unstructured Planetary Environments", IEEE Aerospace Conference 2026.
s3li-etna
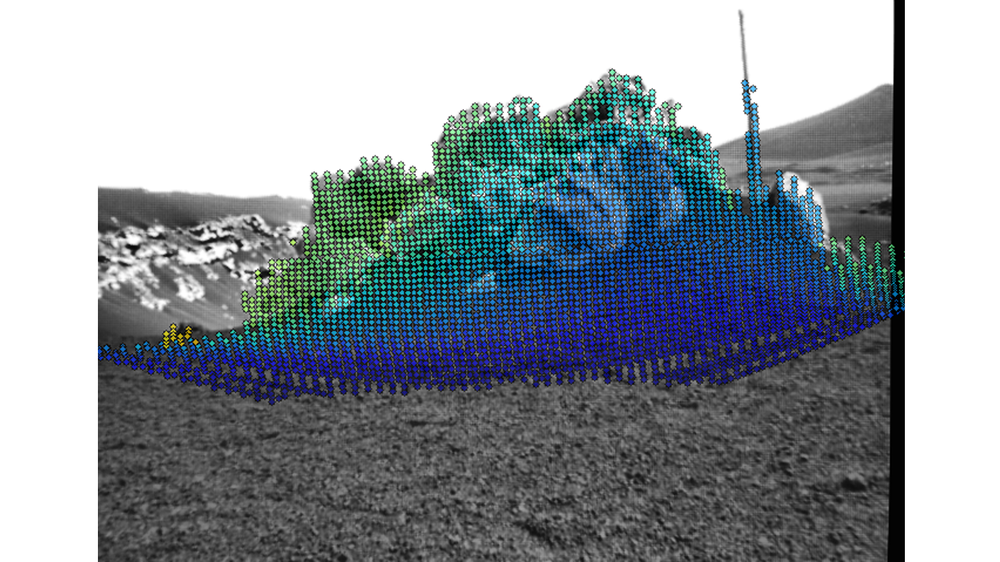
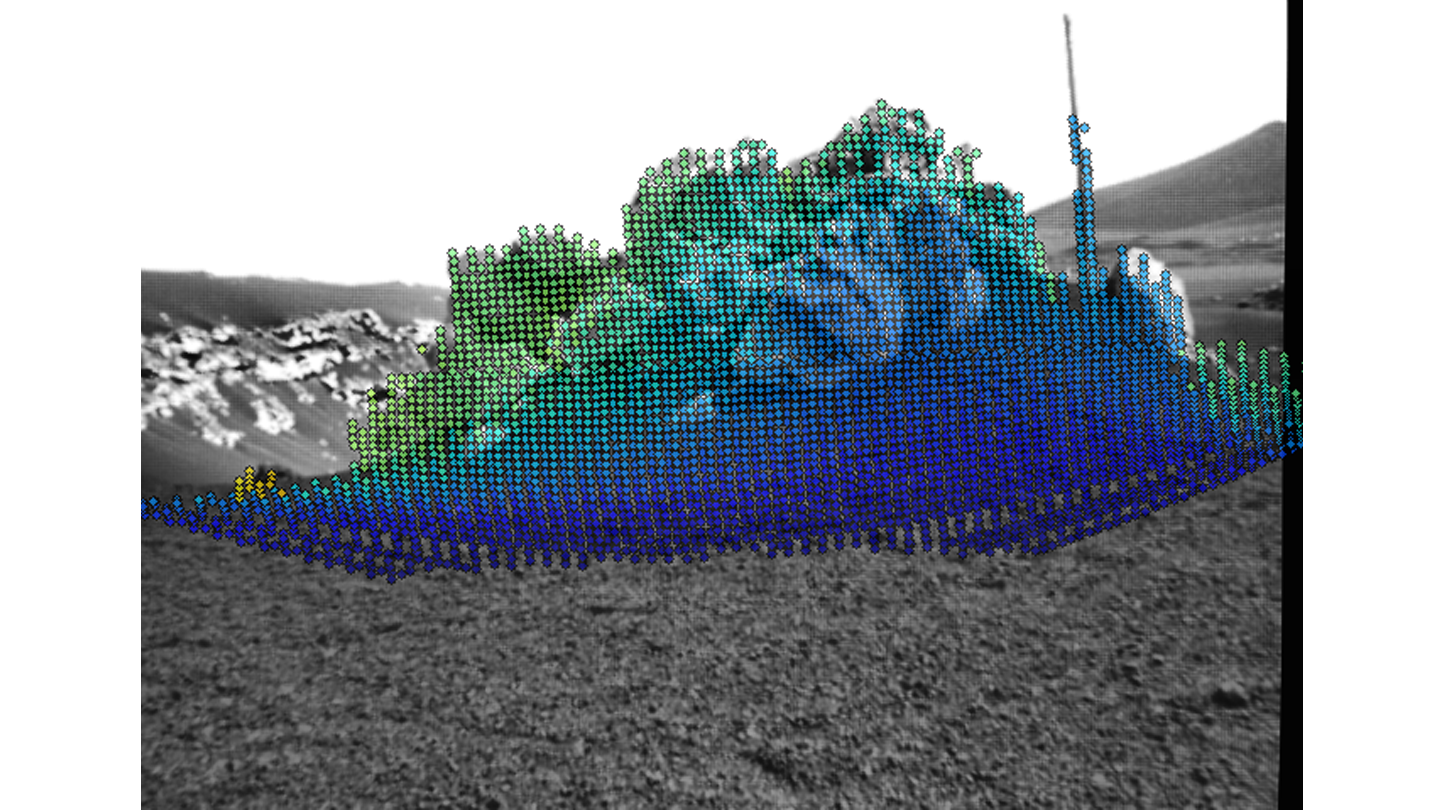
Wir veröffentlichen einen Datensatz, der in der mondähnlichen Umgebung des Ätna auf Sizilien mit einem Sensor-Setup aufgenommen wurde, das eine Stereokamera, ein LiDAR und eine IMU umfasst. Der Datensatz soll mehrere Faktoren aufzeigen, die eine Herausforderung für visuelle und LiDAR-basierte Lokalisierungs- und Kartierungspipelines darstellen, wenn sie in stark unstrukturierten Umgebungen arbeiten. Die schwierigen Beleuchtungsbedingungen in Verbindung mit extremen visuellen Aliasing-Effekten sowie das Fehlen markanter Strukturen schränken die Möglichkeit ein, eine Ortserkennung mit herkömmlichen Ansätzen durchzuführen. Darüber hinaus basiert der in diesem Datensatz verwendete LiDAR-Sensor auf neuartigen Festkörpertechnologien, die vielversprechende Eigenschaften für den Einsatz in Raumfahrtanwendungen aufweisen. Das schmale Sichtfeld (~70H x 30V) des LiDAR-Sensors in Verbindung mit der Geometrie der Landschaft erlaubt es nicht, traditionelles LiDAR-SLAM zu implementieren, sodass die Verwendung des Sensors als Ergänzung zu den visuellen Daten untersucht werden muss. Dieser Datensatz bietet 7 Sequenzen mit besonderen Merkmalen in Bezug auf die Art der Trajektorien und die Art der Landschaft, mit genauer D-GNSS-Ground-Truth.
Die Sequenzen, Ground Truth und Konfigurationsdateien sind zugänglich unter:
Riccardo Giubilato, Wolfgang Stürzl, Armin Wedler, Rudolph Triebel (2022) Challenges of SLAM in Extremely Unstructured Environments: The DLR Planetary Stereo, Solid-State LiDAR, Inertial Dataset. IEEE Robotics and Automation Letters, 7 (4), pp. 8721-8728. IEEE - Institute of Electrical and Electronics Engineers. doi: 10.1109/LRA.2022.3188118. ISSN 2377-3766. [elib]
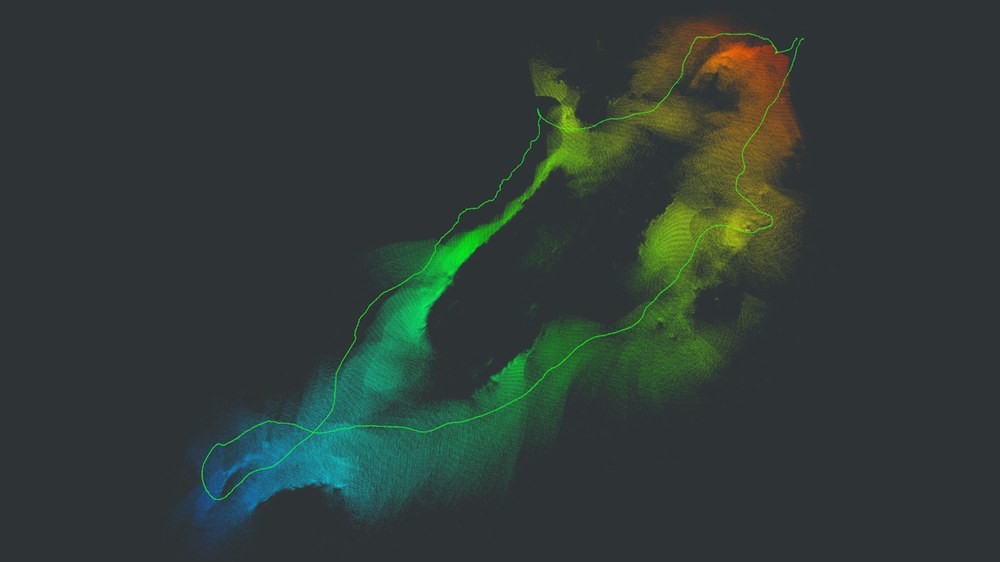
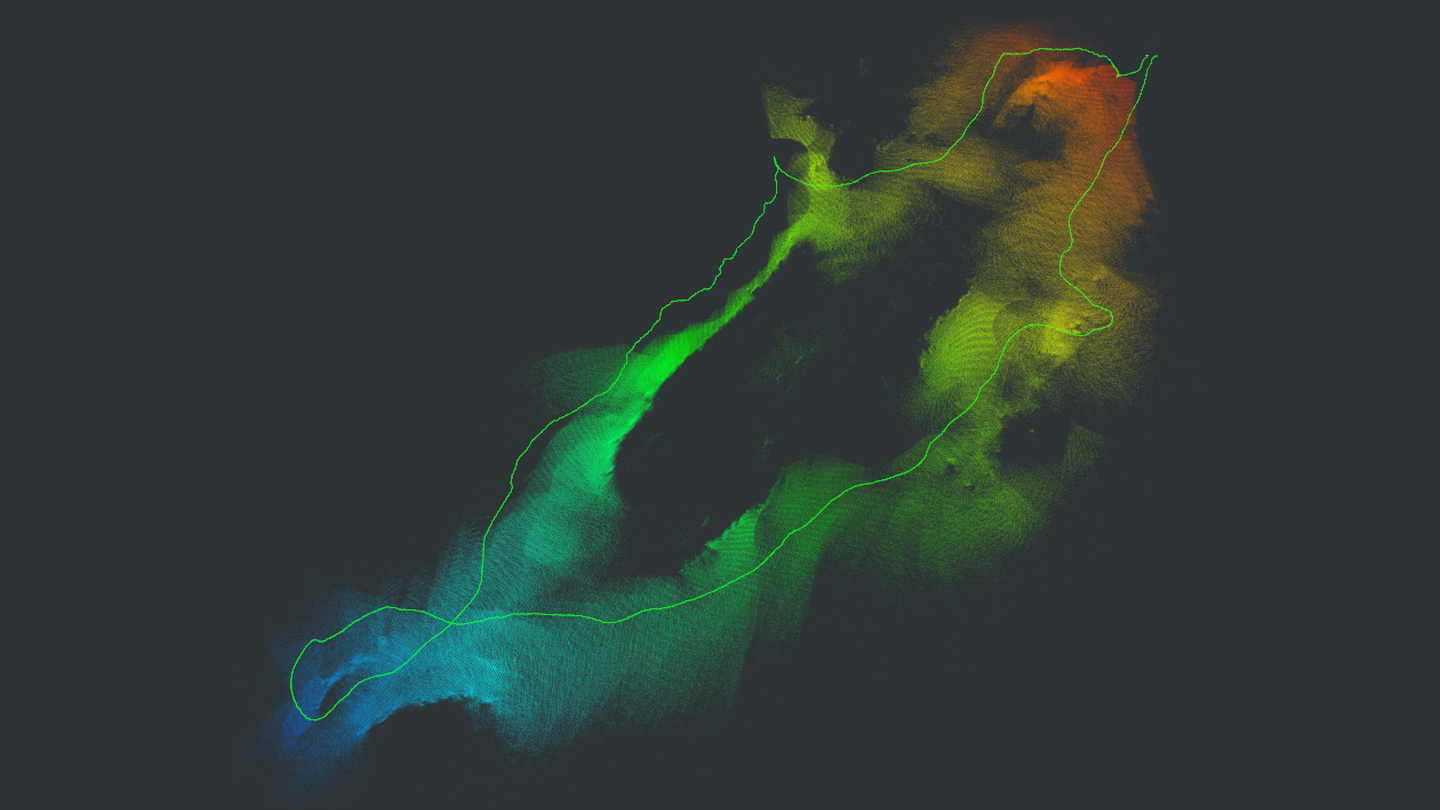
LiDAR Map
Karte, die durch das Stapeln von LiDAR-Scans bei gegebenen Posen der linken Kamera erstellt wurde, berechnet durch Visual-Inertial SLAM
Darstellung des Stereo-Solid-State-LiDAR-Inertial sensoraufbaus, der 2 AVT-Monochromkameras in Stereokonfiguration, einen Blickfeld Cube-1 LiDAR und eine XSens IMU umfasst



{kind=link}
{kind=link}
{kind=link}