DLR CalDe and DLR CalLab – The DLR Camera Calibration Toolbox
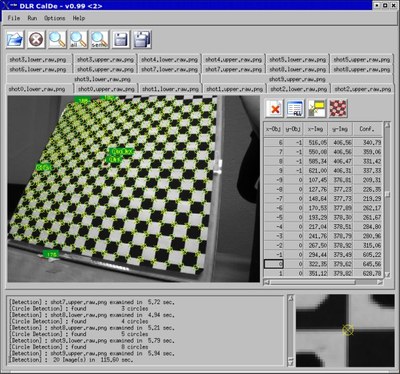
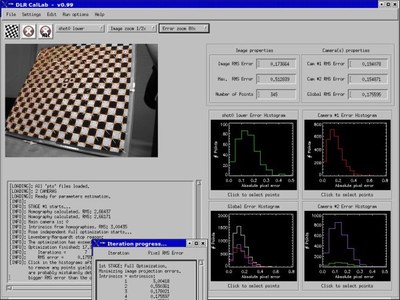
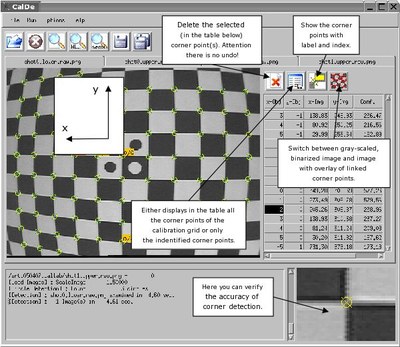
"DLR CalDe and DLR CalLab" is a camera calibration toolbox that implements the well-known method of Zhang, Sturm and Maybank. The toolbox consists of two independent software components: While DLR CalDe detects corner features on the calibration pattern, DLR CalLab addresses the optimal estimation of the camera parameters.