DLR CalDe und DLR CalLab – Die DLR Kamera-Kalibrierungs-Toolbox
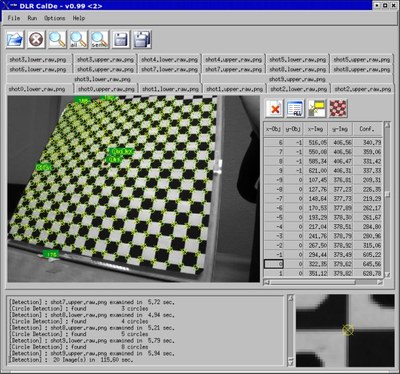
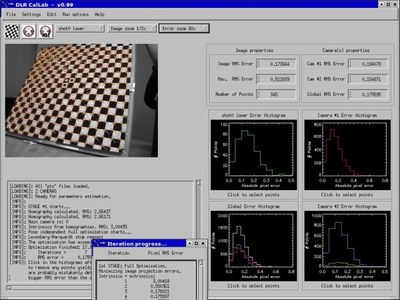
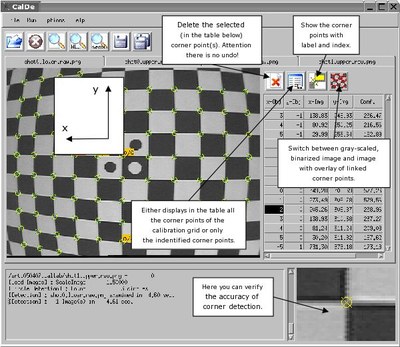
DLR CalDe und DLR CalLab sind eine Toolbox zur Kamerakalibrierung, die die bekannte Methode von Zhang, Sturm und Maybank implementiert. Die Toolbox besteht aus zwei unabhängigen Softwarekomponenten: Während DLR CalDe Eckmerkmale auf dem Kalibrierungsmuster erkennt, kümmert sich DLR CalLab um die optimale Schätzung der Kameraparameter.