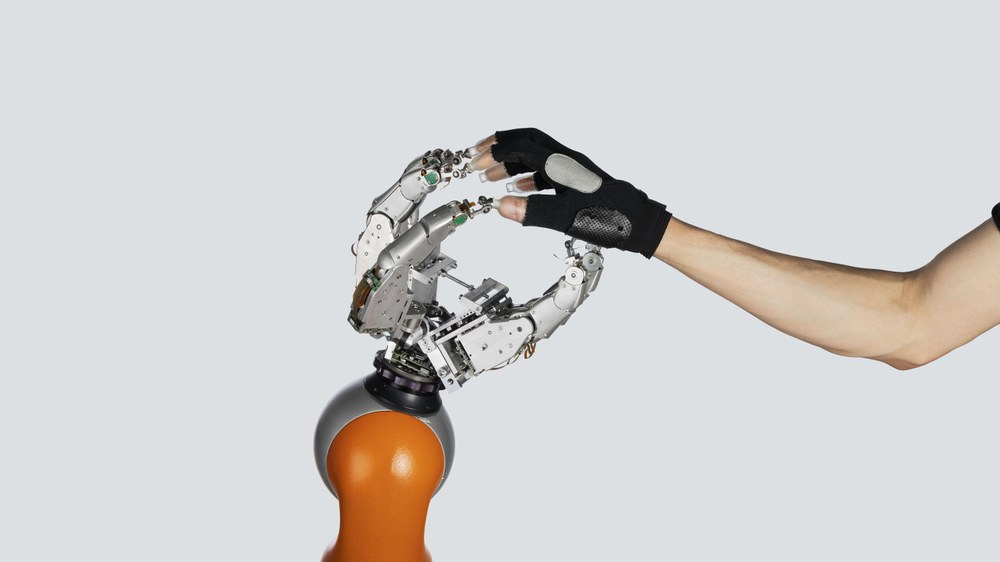
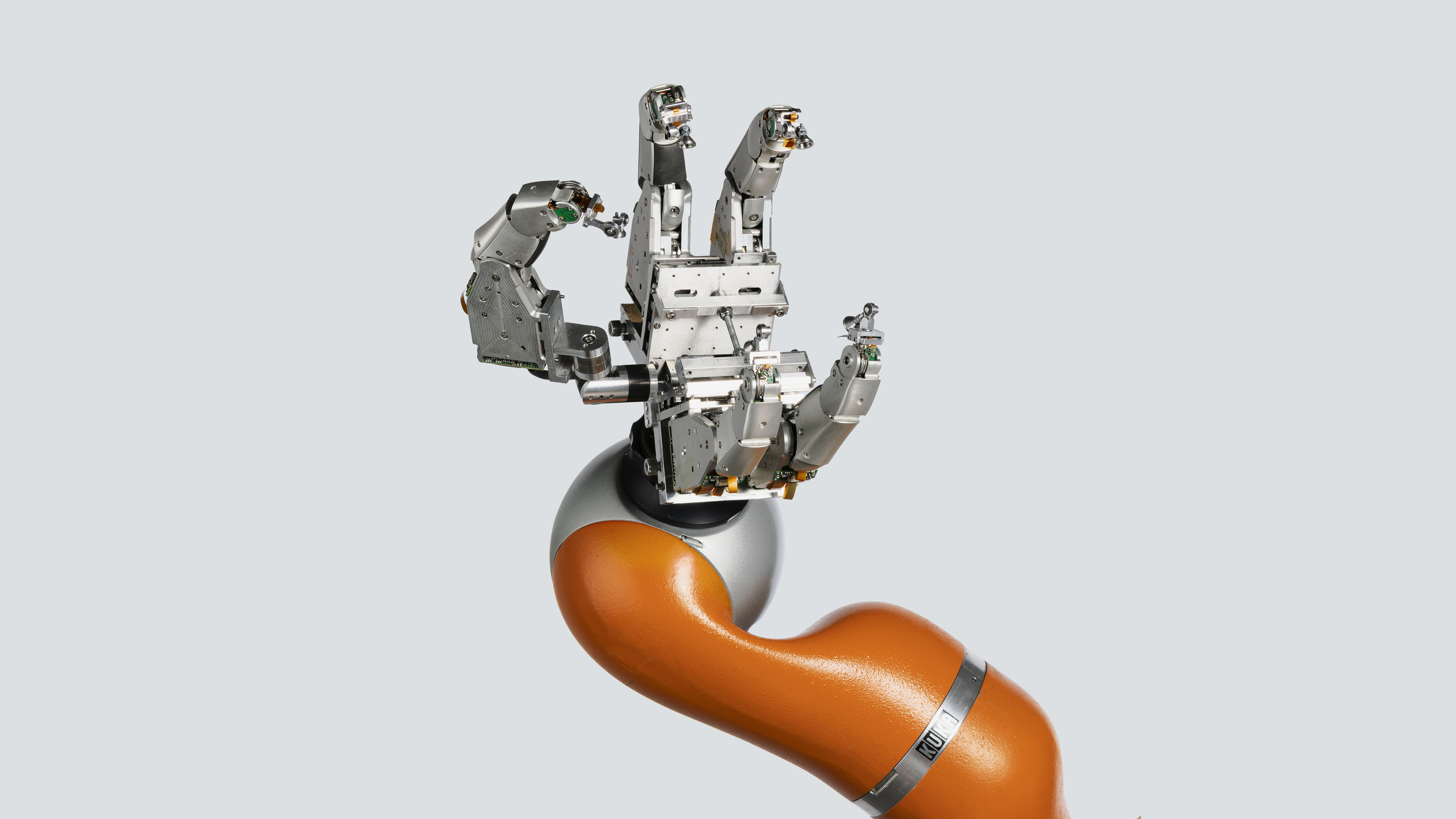
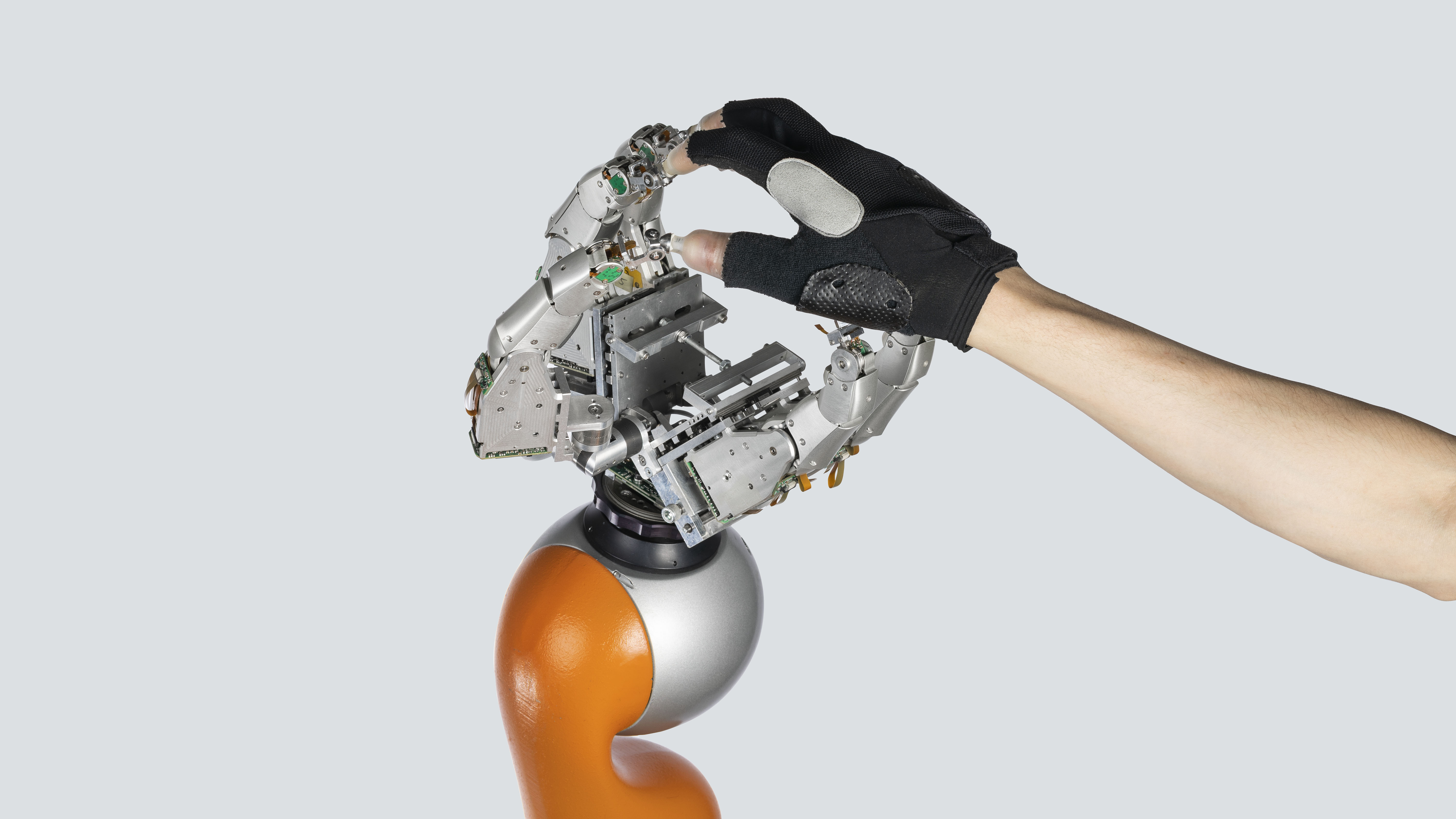
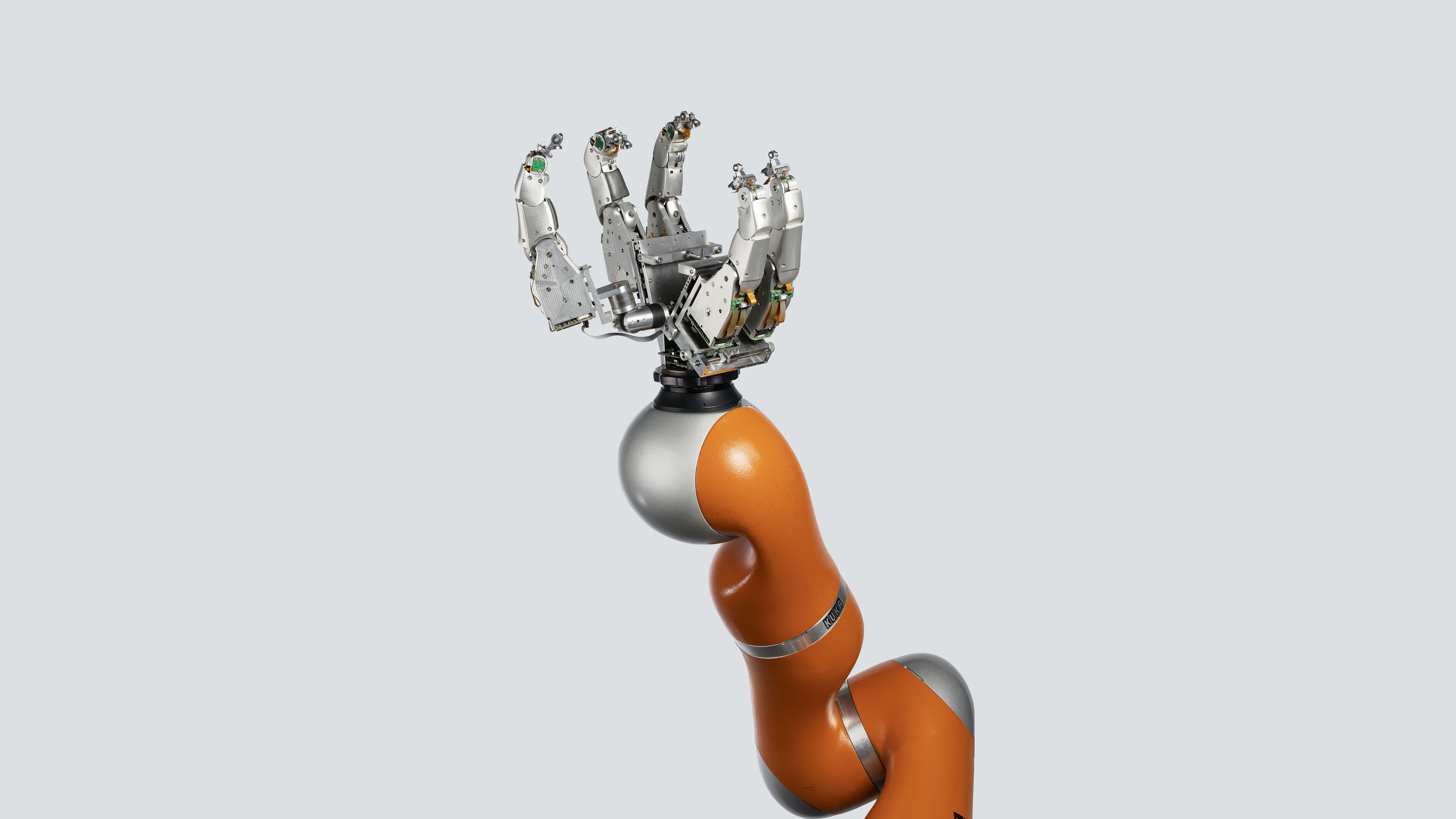
Exodex is an innovative, haptic interaction device for the entire hand, enabling force feedback on the fingers and palm. It was first presented in a scientific publication in 2019.
Technical Data
Weight:
2.02 kg (+13 kg for the robot arm)
Degrees of Freedom:
22 active DoF (3 per finger, 7 in robotic arm) + 8 manually adjustable DoF
Speed:
Finger joints: 360°/s
Arm joints: 120°/s
Features:
Finger and hand tracking
Active 3-DoF force feedback per finger
Gesture recognition
Simulation of virtual objects
System Description
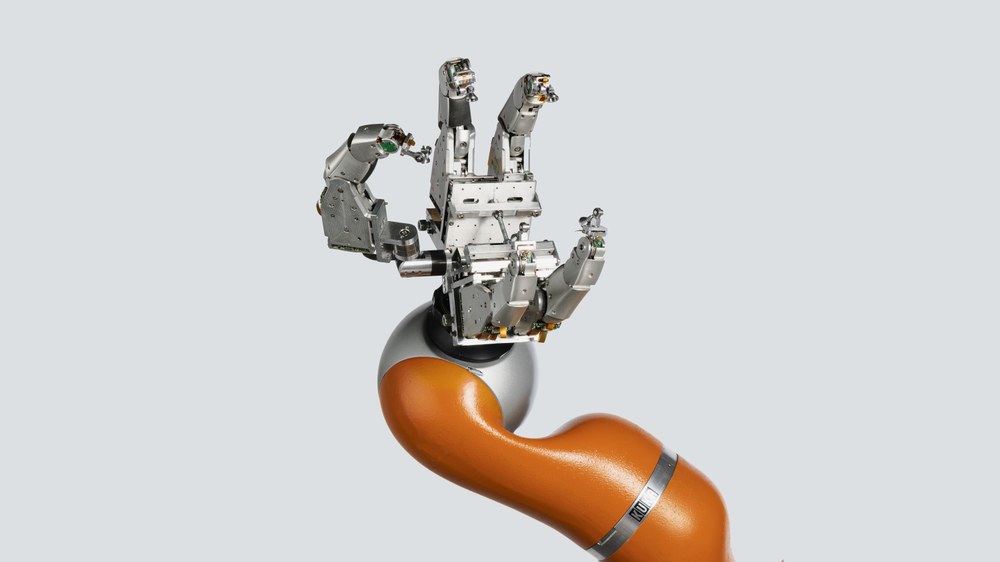
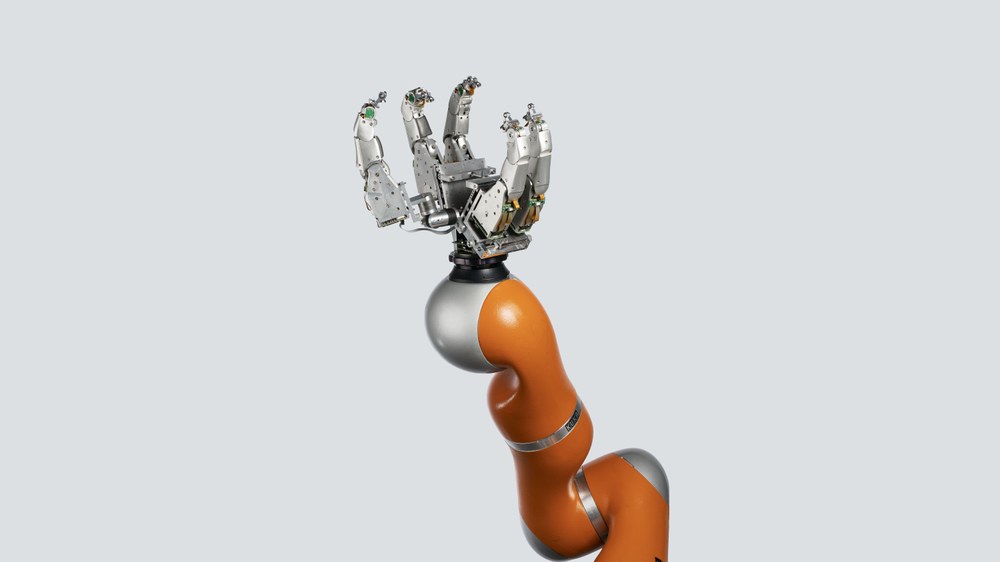
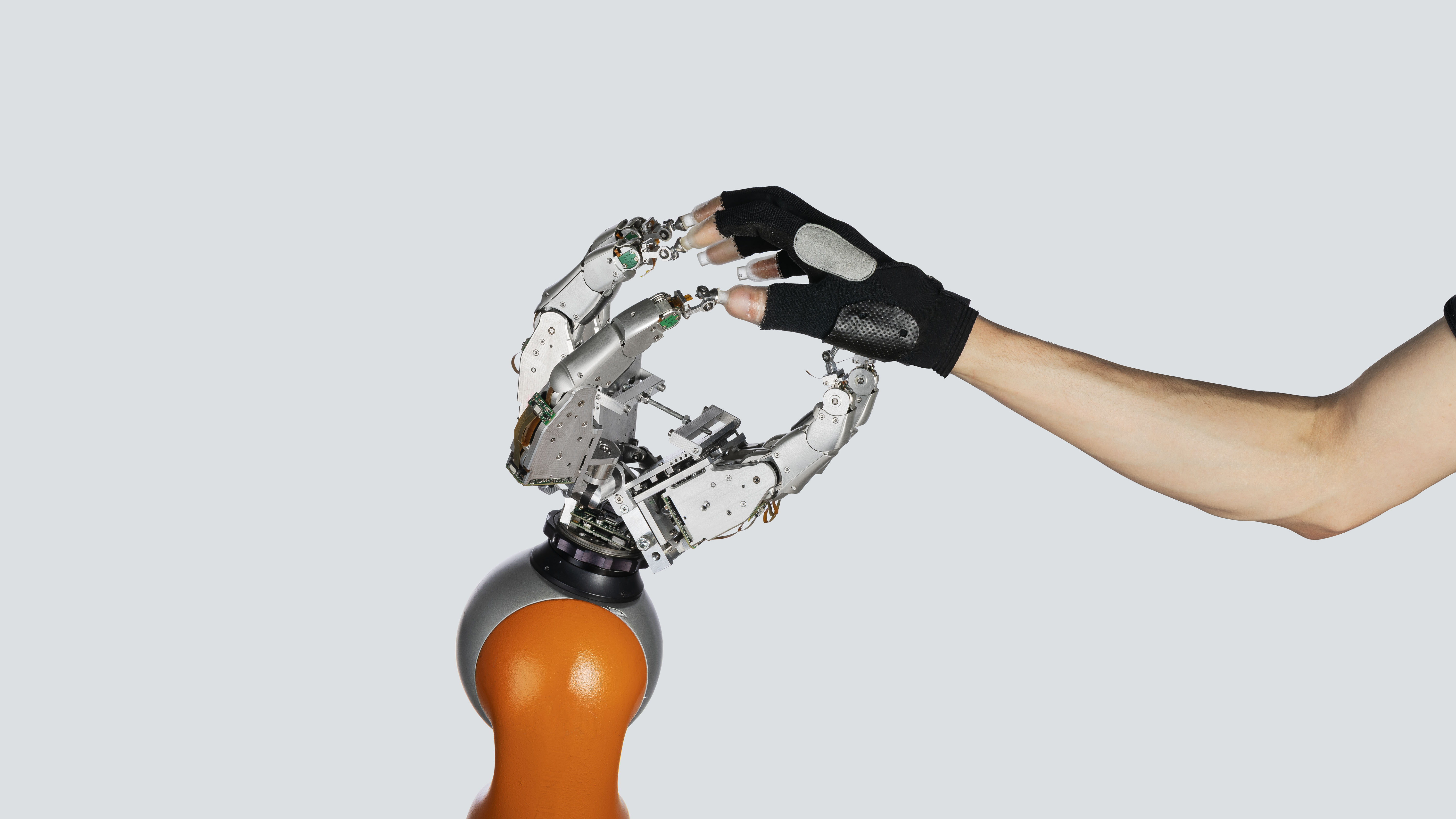
The haptic input device Exodex Adam is based on the proven HIT-Hand-II technology and provides precise 3-DoF force feedback directly to the user's fingertips. It features a unique, front-mounted design, where the system is positioned opposite the user's hand, rather than enclosing it like a hand exoskeleton. Additionally, Exodex Adam is reconfigurable to accommodate different hand sizes and shapes. By integrating with a specially developed glove, the device can accurately track hand position and orientation. Mounted on an LWR-III robotic arm, Exodex Adam offers a large workspace that minimally restricts the user's natural movements. By combining precise force feedback with gesture recognition, Exodex Adam enables immersive and intuitive interaction in virtual environments, allowing users to perform complex tasks without focusing on device operation.
N.Y. Lii, A. Pereira, J. Dietl, G. Stillfried, A. Schmidt, H. Beik-Mohammadi, T. Baker, A. Maier, B. Pleintinger, Z. Chen, A. Elawad, L. Mentzer, A. Pineault, P. Reisich, A. Albu-Schäffer (2022). Exodex adam—a reconfigurable dexterous haptic user interface for the whole hand. Frontiers in Robotics and AI, 8, 716598.



{kind=link}
{kind=link}
{kind=link}
{kind=link}