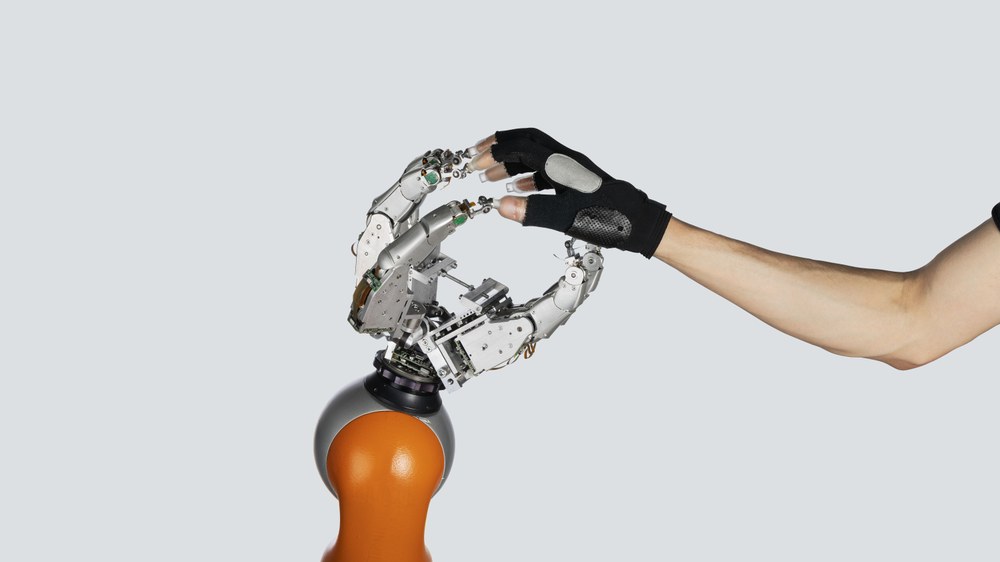
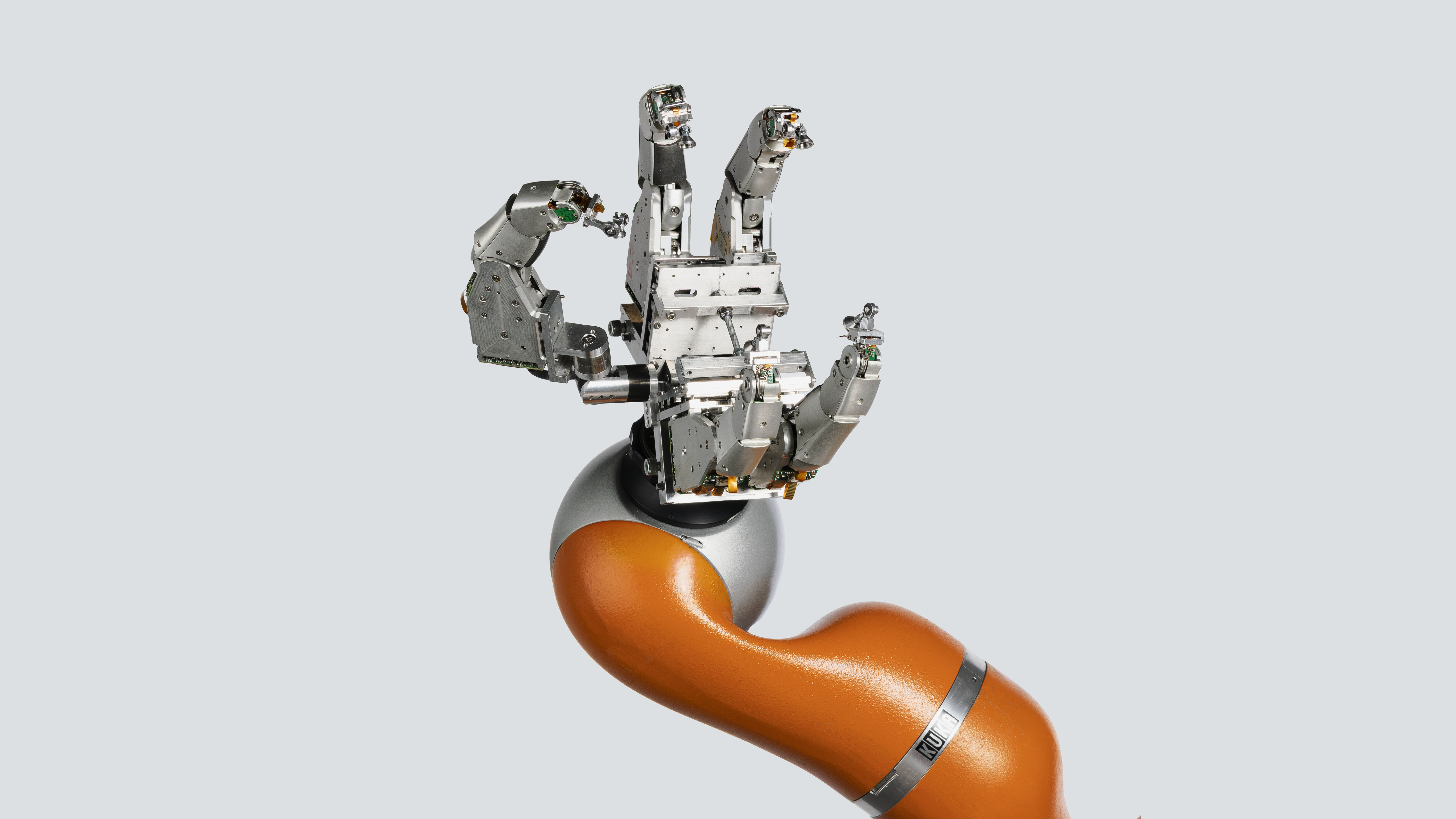
Exodex ist ein innovatives, haptisches Interaktionsgerät für die ganze Hand, das eine Kraftreflexion auf die Finger und die Handfläche ermöglicht. Es wurde 2019 in einer wissenschaftlichen Veröffentlichung erstmalig vorgestellt.
Technische Daten
Gewicht:
2,02 kg (+13 kg Roboterarm)
Freiheitsgrade:
22 aktive Freiheitsgrade (3 pro Finger, 7 im Roboterarm) + 8 manuell einstellbare Freiheitsgrade
Geschwindigkeit:
Fingergelenke: 360°/s
Armgelenke: 120°/s
Besonderheiten:
Handstellungs- und Handpositionserfassung
Aktive 3-DoF-Kraftrückmeldung je Finger
Gestenerfassung
Simulation virtueller Objekte
Systembeschreibung
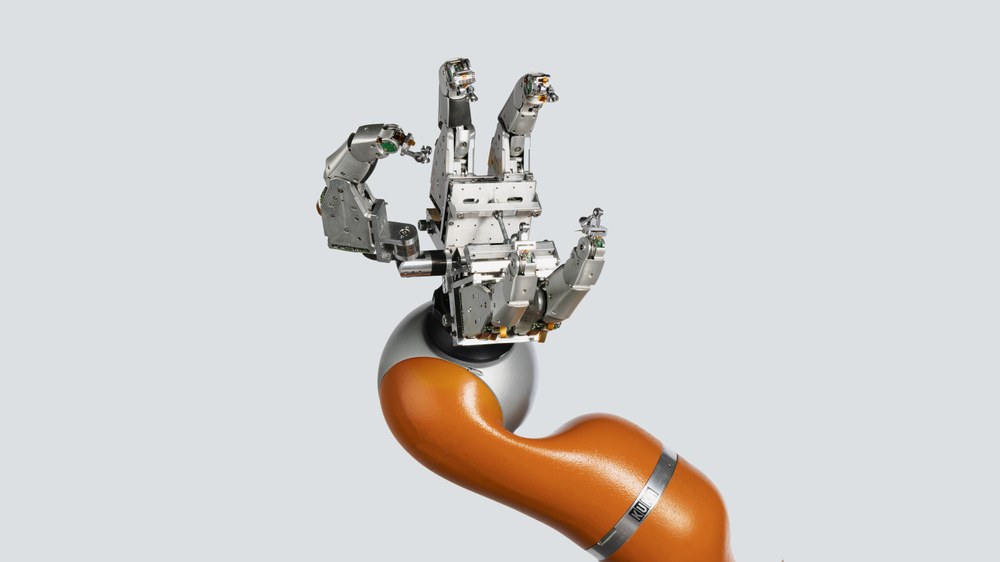
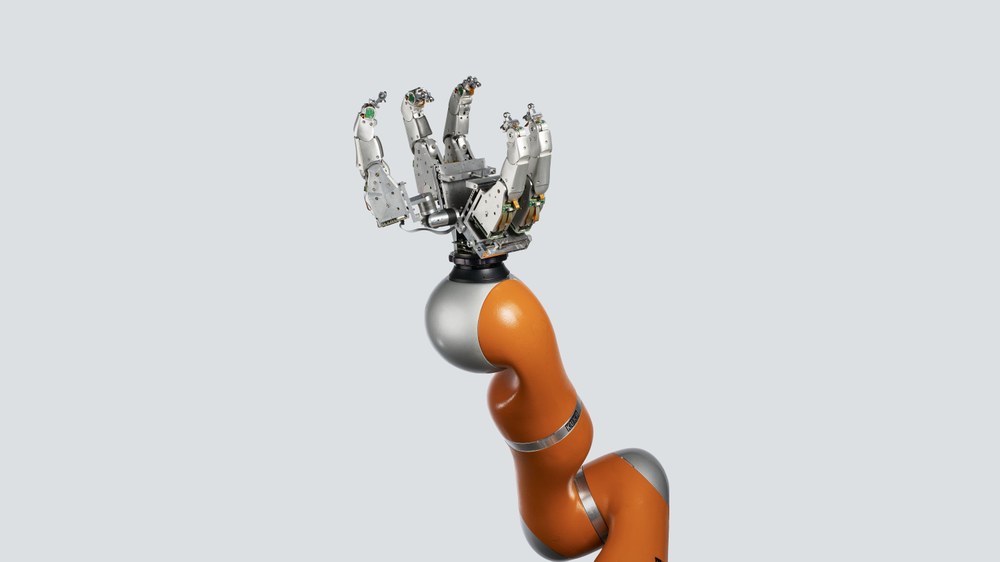
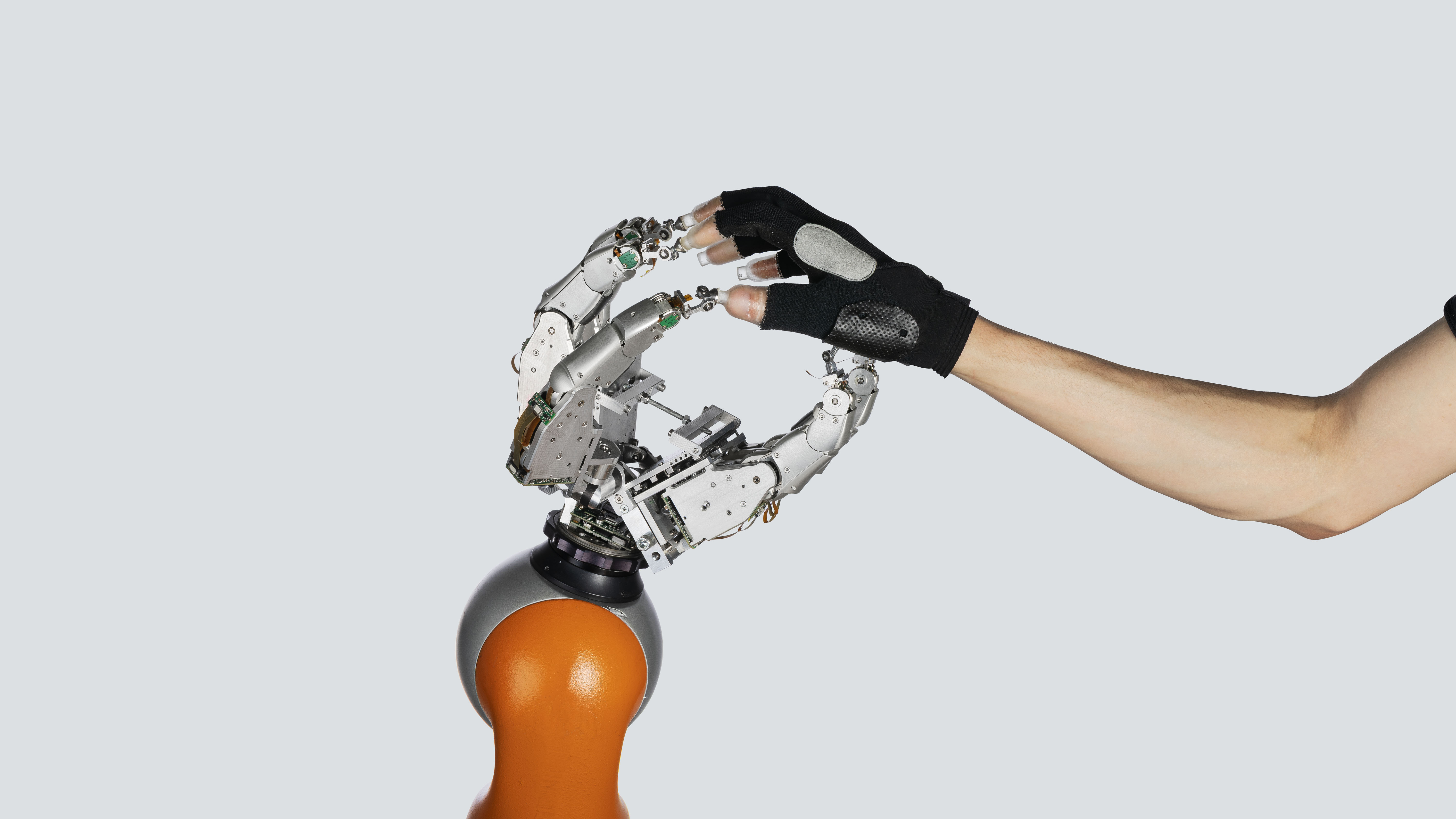
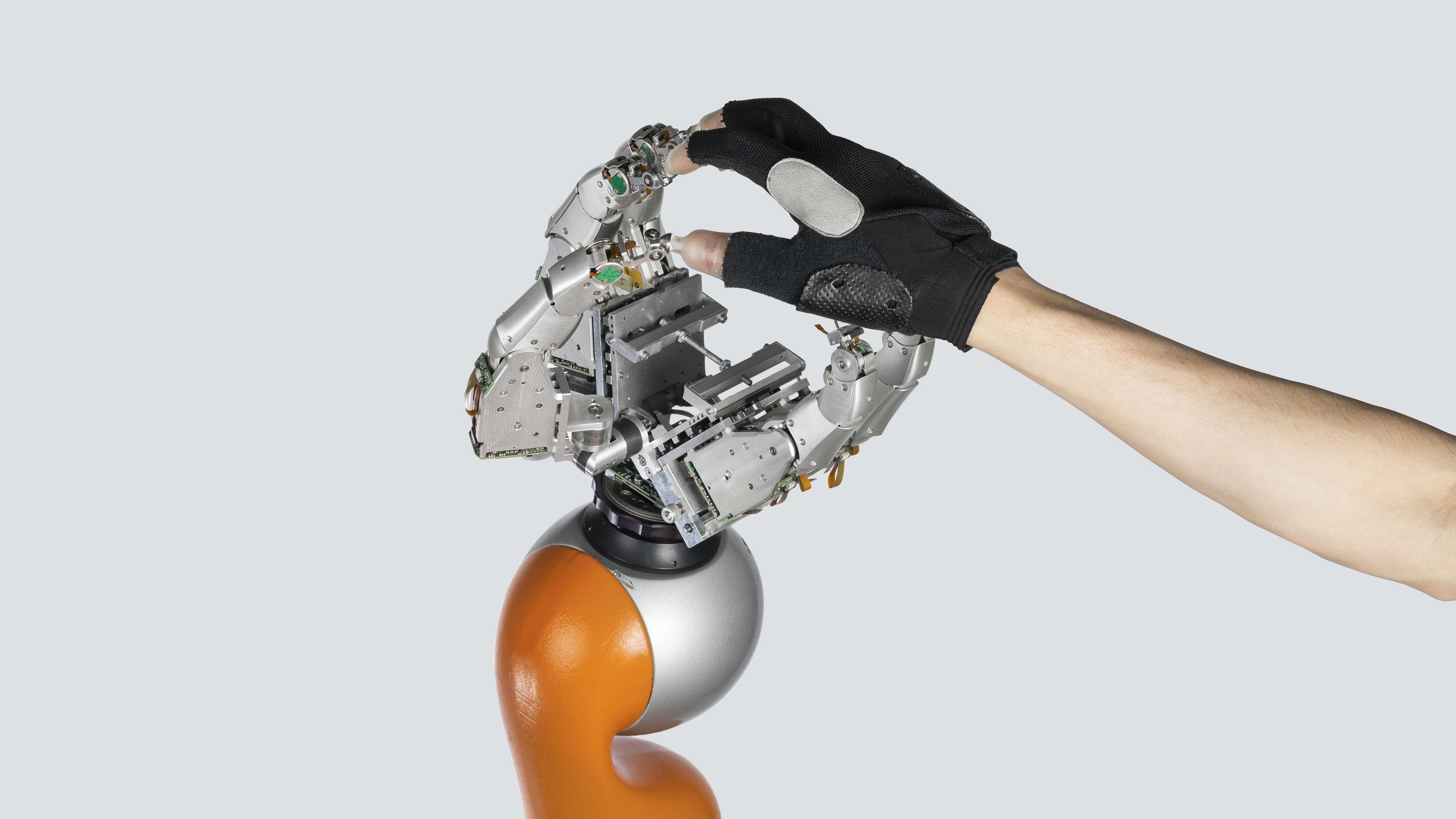
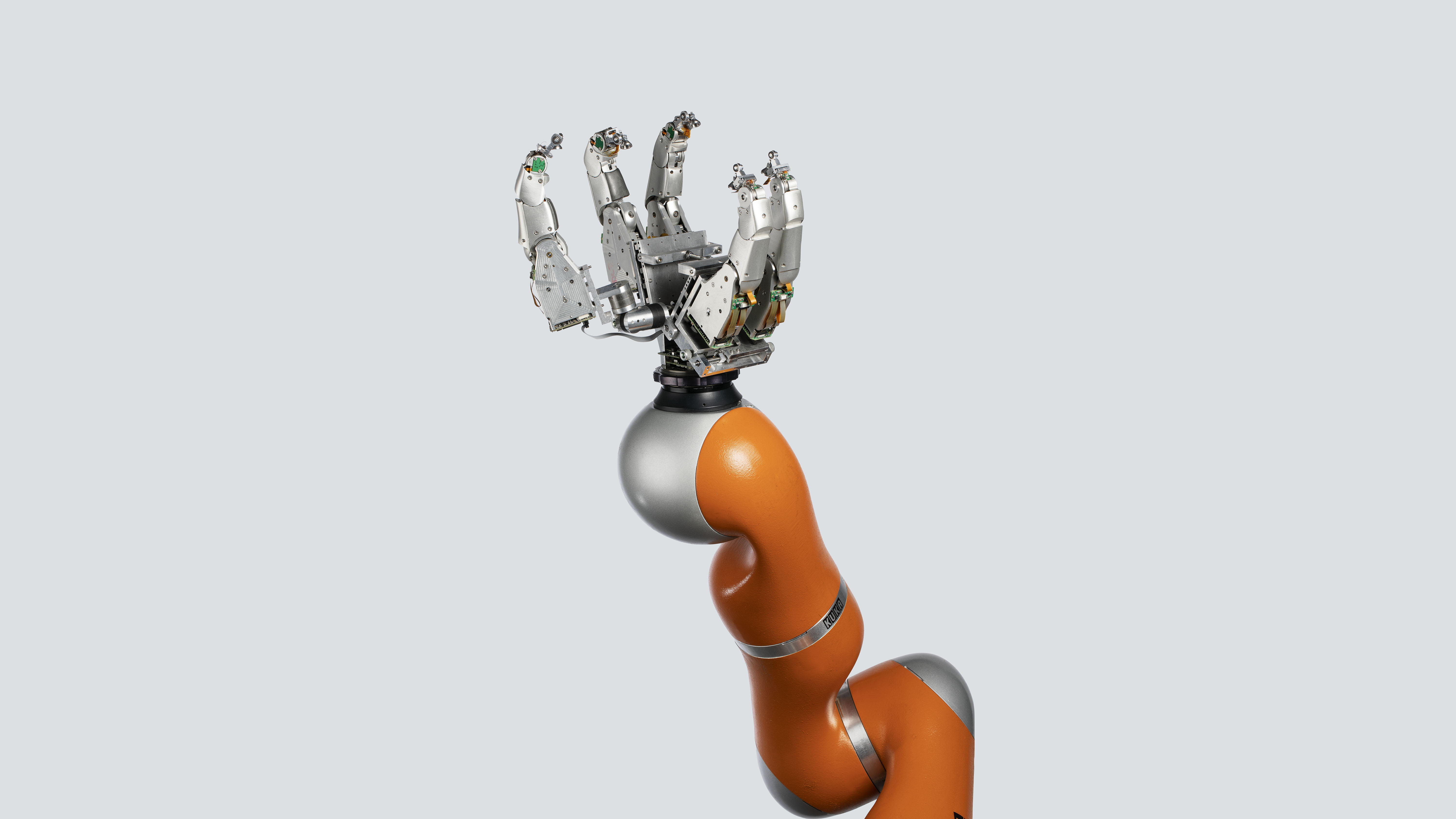
Das haptische Eingabegerät Exodex Adam basiert auf der bewährten HIT-Hand-II-Technologie und liefert präzises 3-DoF-Kraftfeedback direkt an die Fingerspitzen des Benutzers. Es zeichnet sich durch eine einzigartige, frontseitige Anbringung aus, bei der das System der Hand des Benutzers gegenübersteht, anstatt sie wie bei einem Hand-Exoskelett zu umschließen. Darüber hinaus ist Exodex Adam rekonfigurierbar, um es an verschiedene Handgrößen und -formen anzupassen. Durch die Integration mit einem speziell entwickelten Handschuh kann das Gerät die Handposition und -haltung genau verfolgen. Montiert auf einem LWR-III-Roboterarm, bietet Exodex Adam einen großen Arbeitsbereich, der die natürlichen Bewegungen des Menschen nur minimal einschränkt. Durch die Kombination von präzisem Kraftfeedback und Gestenerkennung ermöglicht Exodex Adam eine immersive und intuitive Interaktion in virtuellen Umgebungen, bei der Benutzer komplexe Aufgaben ausführen können, ohne sich auf die Bedienung des Geräts konzentrieren zu müssen.
N.Y. Lii, A. Pereira, J. Dietl, G. Stillfried, A. Schmidt, H. Beik-Mohammadi, T. Baker, A. Maier, B. Pleintinger, Z. Chen, A. Elawad, L. Mentzer, A. Pineault, P. Reisich, A. Albu-Schäffer (2022). Exodex adam—a reconfigurable dexterous haptic user interface for the whole hand. Frontiers in Robotics and AI, 8, 716598.



{kind=link}
{kind=link}
{kind=link}
{kind=link}