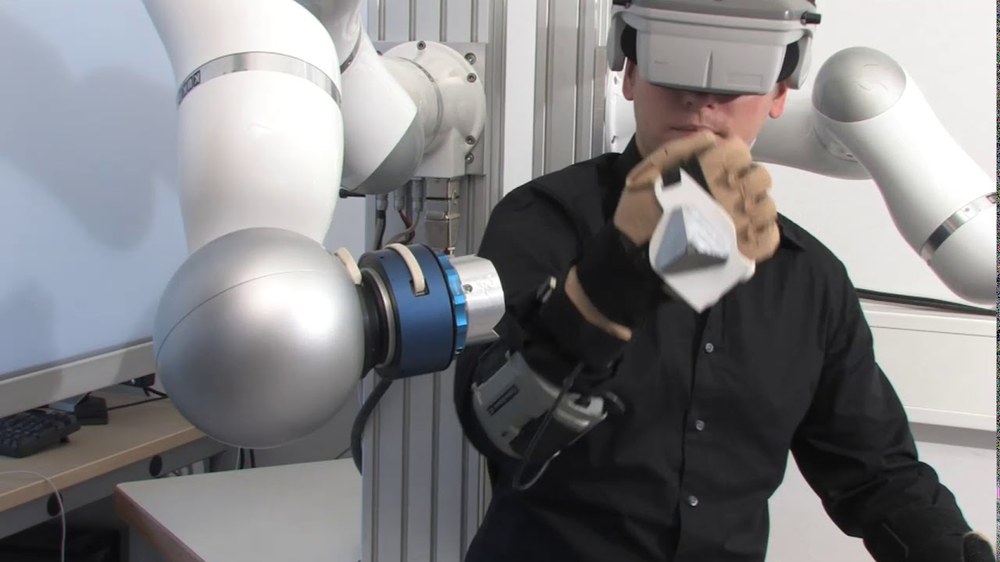
HUG is the haptic user interface for telemanipulating our humanoid robot Justin. With its two light-weight robot arms, HUG can precisely measure the movements conducted by the human operator and at the same time display the forces that occur in the distant environment.
The robotic system HUG was presented to the public for the first time in 2010.
Technical data
Size:
height of basis: 1.46 m
robot length (without tool): 1.10 m
Weight:
approx. 50 kg (of which 2 x 10 kg are dynamic mass)
Degrees of freedom:
2 × 7
Nominal payload:
20 kg
Sensors:
per joint: 1 torque and 2 position sensors
additionally per robot: 6-DoF force-torque sensor at each end-effector
Special features:
various end-effectors can be mounted (e.g. joysticks, brackets for data gloves, or active interfaces for displaying gripping forces)
a multilayered safety architecture (with redundant sensors, magnetic clutches, and intelligent safety checks) detects errors and prevents accidents
an optical tracking system with 5 cameras measures head motion
System description
How to achieve the most realistic force-feedback for our sophisticated haptic applications? This was one of the core questions when developing HUG. HUG is a bimanual haptic device composed of two Light-Weight Robot arms. The two robots are mounted behind the user, such that the intersecting workspace of the robots and the human arms becomes maximal. Equipped with a thorough safety architecture in hard- and software, HUG assures safe operation for human and robot. A particularly advantageous characteristic of HUG is its capability of generating high interaction forces in a comparably large workspace. Various hand interfaces and additional vibro-tactile feedback devices are available to enhance user interaction. Additionally, sophisticated control strategies improve performance and guarantee stability. To this end, HUG is well suited for versatile applications in remote and virtual environments:
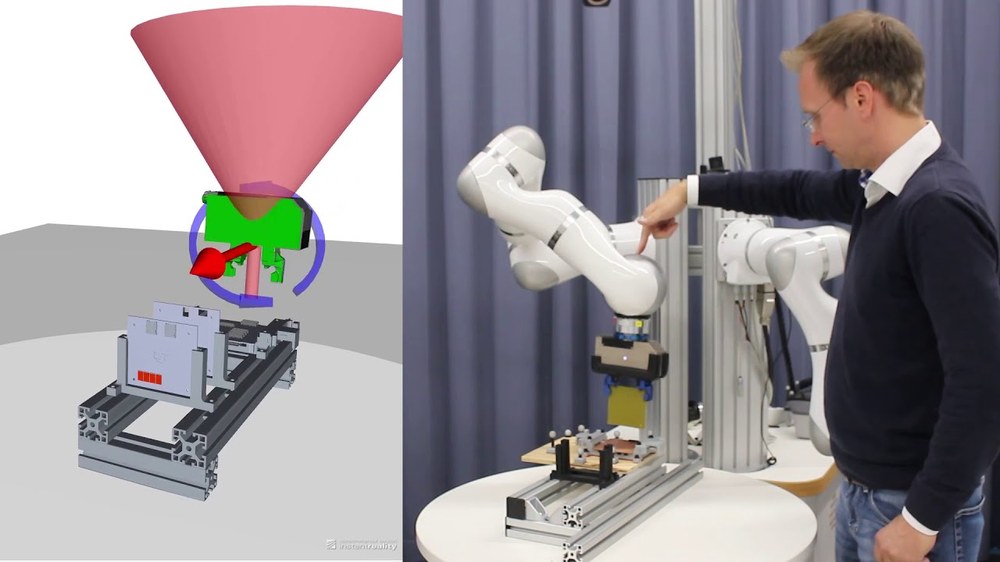
Haptic force feedback enables the operator of a telerobotic system to control the forces that are applied at the remote site and thus even dexterous tasks with fragile parts can be accomplished. This video shows how so-called "virtual fixtures" produce guiding forces to help accomplish teleoperated tasks more quickly and precisely. Further details can be found in the paper "Space Factory 4.0 - New processes for the robotic assembly of modular satellites on an in-orbit platform based on Industrie 4.0 approach". T. Weber Martin et al., International Astronautical Congress (IAC), Oct. 2018.
Video: Space Factory 4.0 Telerobotic Assembly of Cubesats using Virtual Fixtures
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Video: Space Factory 4.0 Telerobotic Assembly of Cubesats using Virtual Fixtures
Haptic force feedback enables the operator of a telerobotic system to control the forces that are applied at the remote site and thus even dexterous tasks with fragile parts can be accomplished. This video shows how so-called "virtual fixtures" produce guiding forces to help accomplish teleoperated tasks more quickly and precisely. Further details can be found in the paper "Space Factory 4.0 - New processes for the robotic assembly of modular satellites on an in-orbit platform based on Industrie 4.0 approach". T. Weber Martin et al., International Astronautical Congress (IAC), Oct. 2018.
HUG is a haptic user interface for teleoperating advanced robotic systems as the humanoid robot Justin or the assistive robotic system EDAN. With its lightweight robot arms, HUG can measure human movements and simultaneously display forces from the distant environment. In addition to such teleoperation applications, HUG serves as a research platform for virtual assembly simulations, rehabilitation, and training.
Video: The DLR Bimanual Haptic Device
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Video: The DLR Bimanual Haptic Device
HUG is a haptic user interface for teleoperating advanced robotic systems as the humanoid robot Justin or the assistive robotic system EDAN. With its lightweight robot arms, HUG can measure human movements and simultaneously display forces from the distant environment. In addition to such teleoperation applications, HUG serves as a research platform for virtual assembly simulations, rehabilitation, and training.
Das Robotersystem HUG ist eine haptische Eingabestation für die telemanipulierte Steuerung anderer robotischer Systeme. Das System kommt beim Projekt Smile2gether zum Einsatz.
J. Vogel, D. Leidner, A. Hagengruber, M. Panzirsch, B. Bäuml, M. Denninger, U. Hillenbrand, L. Suchenwirth, et al.: An Ecosystem for Heterogeneous Robotic Assistants in Caregiving, IEEE Robotics and Automation Magazine, 2021 (accepted)




{kind=link}
{kind=link}

{kind=link}