
HUG

Technische Daten
Größe: | Höhe der Basis: 1,46 m; Länge der Roboterarme (ohne Tool): 1,10 m |
Gewicht: | ca. 50 kg (davon dynamische Masse ca. 2 x 10 kg) |
Freiheitsgrade: | 2 × 7 |
Nominale Nutzlast: | 20 kg |
Sensoren: |
|
Besonderheiten: |
|
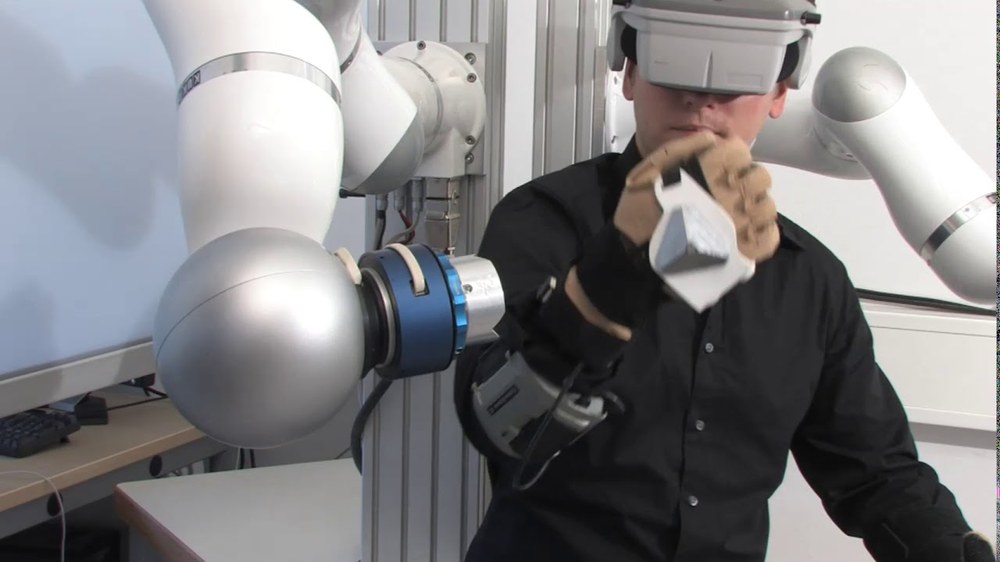
HUG ist eine haptische Eingabestation für die telemanipulierte Steuerung komplexer Robotersysteme, wie des humanoiden Roboters Justin oder des robotischen Assistenzsystems EDAN. Durch seine Leichtbauroboterarme kann HUG die Bewegungen des Menschen messen und ihm gleichzeitig Kräfte aus der entfernten Umgebung darstellen. Neben haptischen Telerobotikanwendungen dient das System auch als Forschungsplattform für virtuelle Montagesimulationen, Rehabilitation und Training.
Video: Das bimanuelle haptische Gerät des DLR
Video: Das bimanuelle haptische Gerät des DLR
HUG ist eine haptische Eingabestation für die telemanipulierte Steuerung komplexer Robotersysteme, wie des humanoiden Roboters Justin oder des robotischen Assistenzsystems EDAN. Durch seine Leichtbauroboterarme kann HUG die Bewegungen des Menschen messen und ihm gleichzeitig Kräfte aus der entfernten Umgebung darstellen. Neben haptischen Telerobotikanwendungen dient das System auch als Forschungsplattform für virtuelle Montagesimulationen, Rehabilitation und Training.
Credit:
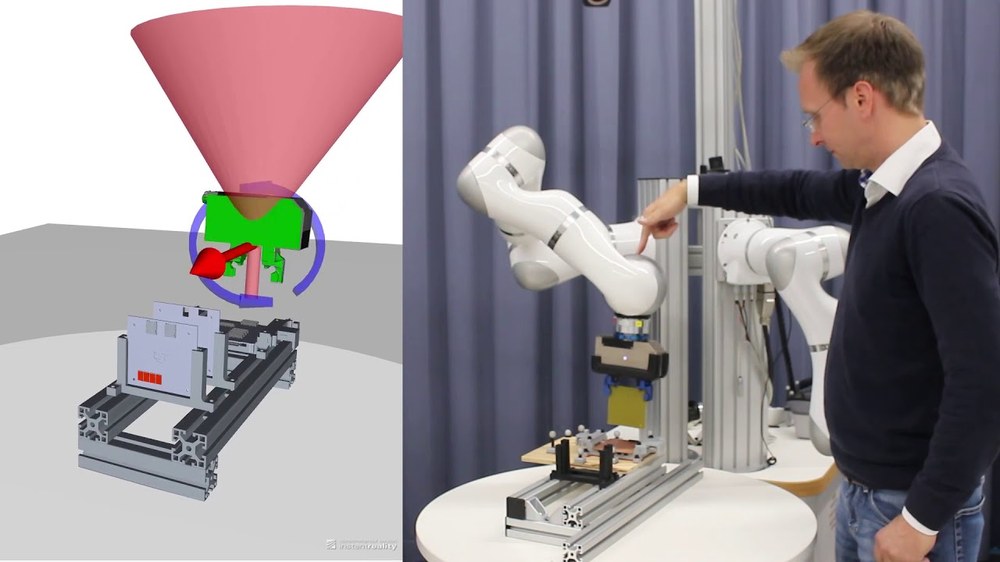
Haptische Kraftrückmeldung ermöglicht es dem Bediener eines telerobotischen Systems, die Kräfte zu kontrollieren, die an der entfernten Stelle aufgebracht werden, und so auch geschickte Aufgaben mit zerbrechlichen Teilen zu bewältigen. Dieses Video zeigt, wie so genannte "virtuelle Vorrichtungen" Führungskräfte erzeugen, die helfen, teleoperierte Aufgaben schneller und präziser zu erledigen. Weitere Details finden Sie in dem Papier "Space Factory 4.0 - Neue Prozesse für die robotergestützte Montage von modularen Satelliten auf einer In-Orbit-Plattform basierend auf dem Industrie 4.0-Ansatz". T. Weber Martin et al., Internationaler Astronautischer Kongress (IAC), Okt. 2018
Video: Space Factory 4.0 Telerobotische Montage von Cubesats mit virtuellen Vorrichtungen
Video: Space Factory 4.0 Telerobotische Montage von Cubesats mit virtuellen Vorrichtungen
Haptische Kraftrückmeldung ermöglicht es dem Bediener eines telerobotischen Systems, die Kräfte zu kontrollieren, die an der entfernten Stelle aufgebracht werden, und so auch geschickte Aufgaben mit zerbrechlichen Teilen zu bewältigen. Dieses Video zeigt, wie so genannte "virtuelle Vorrichtungen" Führungskräfte erzeugen, die helfen, teleoperierte Aufgaben schneller und präziser zu erledigen. Weitere Details finden Sie in dem Papier "Space Factory 4.0 - Neue Prozesse für die robotergestützte Montage von modularen Satelliten auf einer In-Orbit-Plattform basierend auf dem Industrie 4.0-Ansatz". T. Weber Martin et al., Internationaler Astronautischer Kongress (IAC), Okt. 2018
Credit:


{kind=link}
{kind=link}

AUTOMATICA 2022
Das Robotersystem HUG ist eine haptische Eingabestation für die telemanipulierte Steuerung anderer robotischer Systeme. Das System kommt beim Projekt Smile2gether zum Einsatz.
{kind=link}