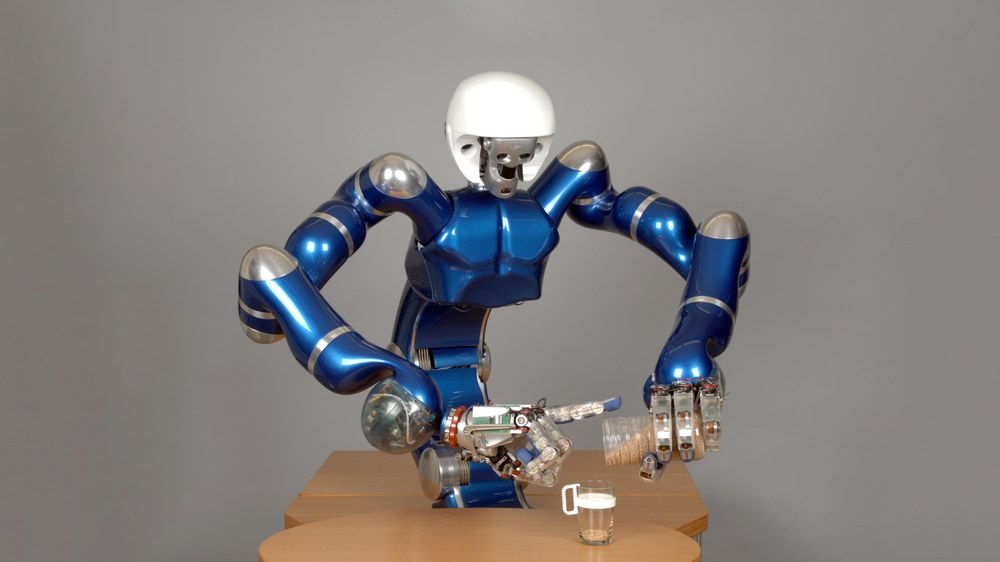
Table Justin was the first humanoid robot developed by the German Aerospace Center (DLR). This humanoid two-arm system was created as a research platform for investigating two-handed dexterity. It was presented for the first time at the Automatica trade fair in 2006, marking a significant milestone in DLR's robotics research. Table Justin also served as the foundational technology for later humanoid robots Rollin' Justin, Agile Justin, and SpaceJustin.
Head with 2 stereo cameras, a laser-stripe profiler, and a laser-range scanner
System description
Table Justin was based on the modular DLR Lightweight Robot-III and the DLR Hand-II. The two arms and hands were integrated with a three-degree-of-freedom articulated torso and a multi-sensory head to form a complete humanoid upper body.
These technologies enable the robot to detect and precisely manipulate objects in its environment in real time. The mechanical design was guided by the following requirements:
The system should be capable of reaching objects on the floor as well as objects on a shelf up to a height of about 2 meters.
The anthropomorphic kinematic configuration was specifically designed to facilitate research into two-handed grasping strategies.
Link-side torque sensors, which had already proven effective in the arms and hands, were integrated throughout the system.
For scene analysis, a sensor head was mounted on a pan-tilt unit with two degrees of freedom, combining stereo vision and laser range sensors.
Publications
C. Borst, C. Ott, T. Wimbock, B. Brunner, F. Zacharias, B. Bauml, U. Hillenbrand, S. Haddadin, A. Albu-Schäffer, G. Hirzinger. A humanoid upper body system for two-handed manipulation. In IEEE International Conference on Robotics and Automation (ICRA), 2007.
F. Zacharias, C. Borst, G. Hirzinger. Online generation of reachable grasps for dexterous manipulation using a representation of the reachable workspace. In IEEE International Conference on Advanced Robotics (ICAR), 2009.



{kind=link}
{kind=link}