Table Justin war der erste humanoide Roboter, der vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelt wurde. Dieses humanoide zweiarmige System wurde als Forschungsplattform für die Erforschung der beidhändigen Geschicklichkeit geschaffen. Er wurde erstmals auf der Messe Automatica im Jahr 2006 vorgestellt und markierte einen wichtigen Meilenstein in der Robotikforschung des DLR. Table Justin diente auch als Basistechnologie für die späteren humanoiden Roboter Rollin' Justin, Agile Justin und SpaceJustin.
Kopf mit 2 Stereokameras, einem Laser-Streifenprofiler und einem Laser-Entfernungsmesser
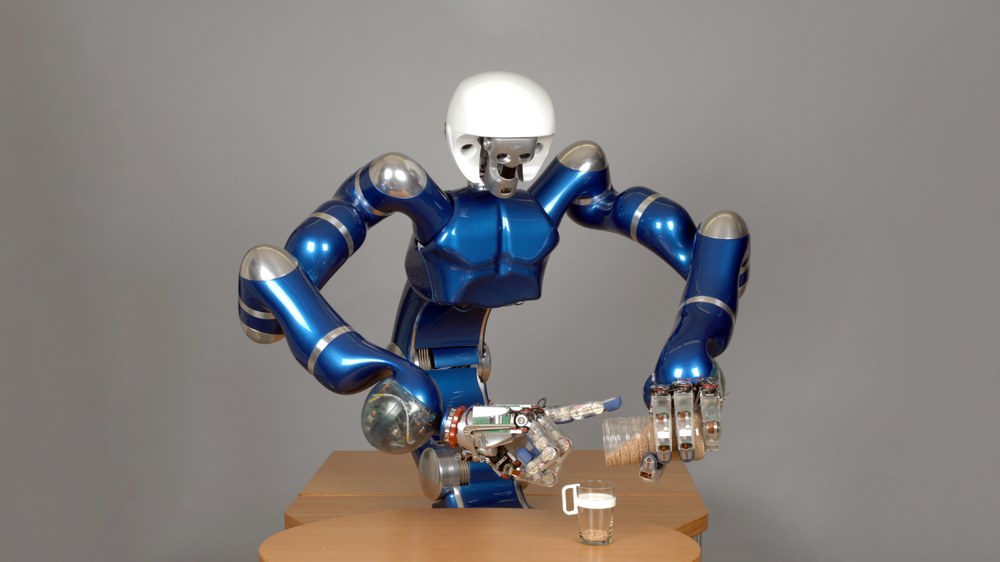
Systembeschreibung
Table Justin basiert auf dem modularen DLR Lightweight Robot-III und der DLR Hand-II. Die beiden Arme und Hände wurden mit einem gelenkigen Torso mit drei Freiheitsgraden und einem multisensorischen Kopf zu einem kompletten humanoiden Oberkörper integriert.
Diese Technologien ermöglichen es dem Roboter, Objekte in seiner Umgebung in Echtzeit zu erkennen und präzise zu manipulieren. Das mechanische Design wurde von den folgenden Anforderungen geleitet:
Das System sollte in der Lage sein, sowohl Objekte auf dem Boden als auch auf einem Regal bis zu einer Höhe von etwa 2 Metern zu erreichen.
Die anthropomorphe kinematische Konfiguration wurde speziell entwickelt, um die Erforschung beidhändiger Greifstrategien zu erleichtern.
Die linksseitigen Drehmomentsensoren, die sich bereits in den Armen und Händen bewährt hatten, wurden in das gesamte System integriert.
Für die Szenenanalyse wurde ein Sensorkopf auf einer Schwenk-Neige-Einheit mit zwei Freiheitsgraden montiert, die Stereosicht und Laserentfernungssensoren kombiniert.
Publikationen
C. Borst, C. Ott, T. Wimbock, B. Brunner, F. Zacharias, B. Bauml, U. Hillenbrand, S. Haddadin, A. Albu-Schäffer, G. Hirzinger. A humanoid upper body system for two-handed manipulation. In IEEE International Conference on Robotics and Automation (ICRA), 2007.
F. Zacharias, C. Borst, G. Hirzinger. Online generation of reachable grasps for dexterous manipulation using a representation of the reachable workspace. In IEEE International Conference on Advanced Robotics (ICAR), 2009.



{kind=link}
{kind=link}