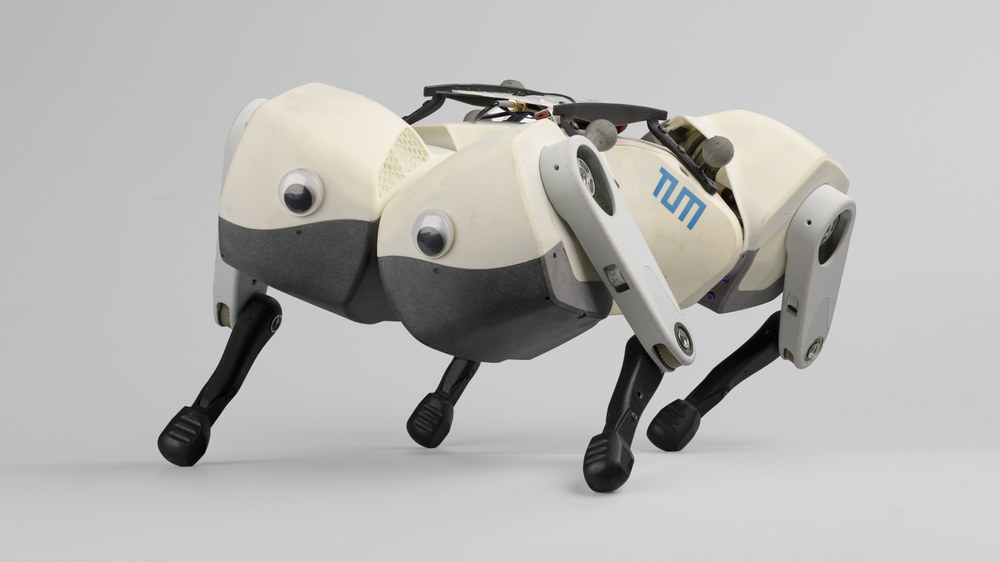
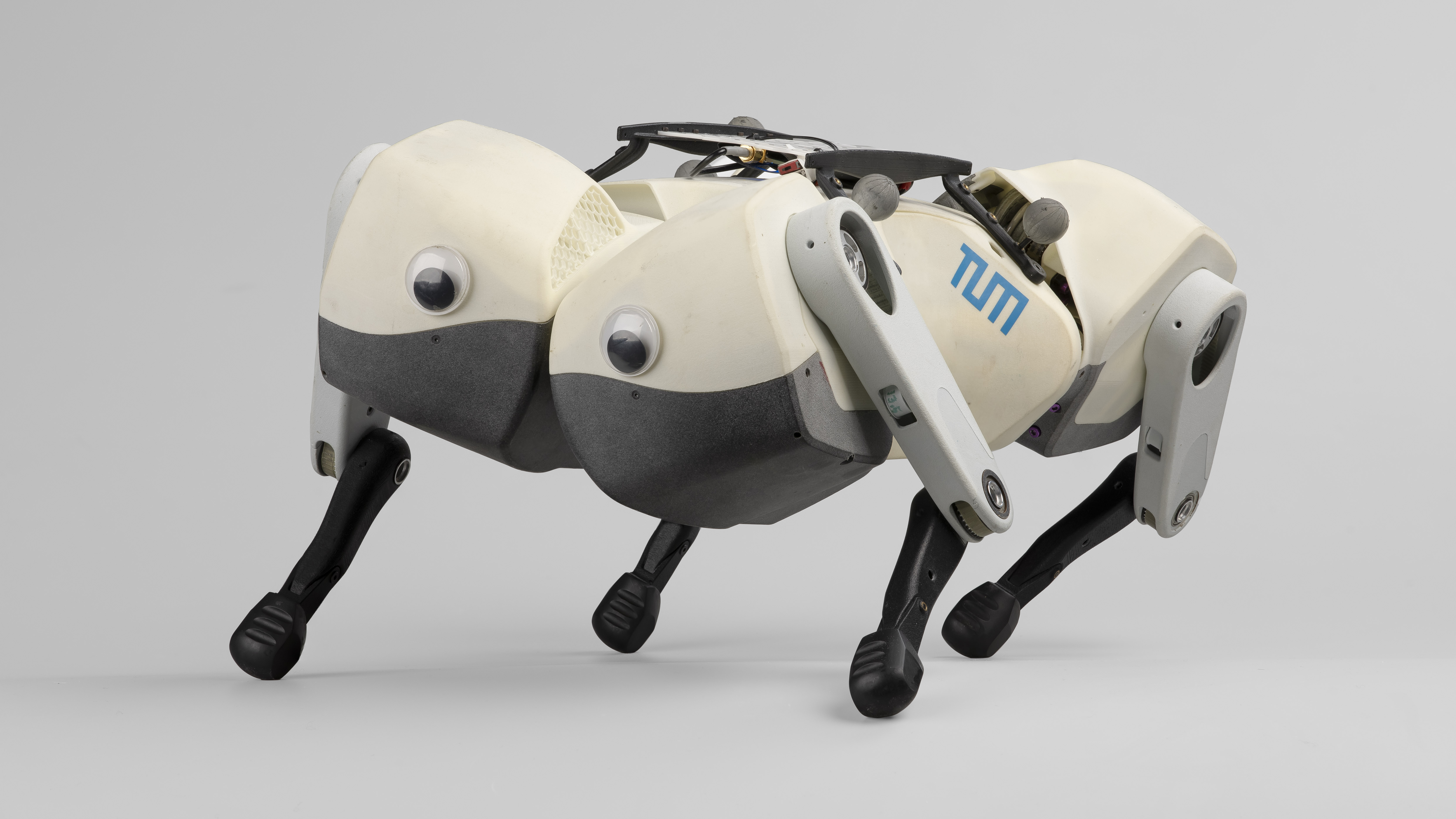
Berts are a family of elastic quadrupeds originally developed to investigate the exploitation of intrinsic oscillations of mechanical systems. The goal is to develop energy-efficient locomotion, which is crucial for space exploration, where battery life is limited. The concept follows a rapid-prototyping philosophy, resulting in multiple generations with increasing capability and robustness. Thanks to their compliant design and lightweight construction, Berts enable direct application of reinforcement learning on hardware, thereby avoiding sim-to-real transfer issues. Due to their springy motion and approachable appearance, Berts are engaging for kids and adults alike.
The Bert system was presented to the public for the first time in 2017.
Whitebert is the original Bert platform. Its mechanical parameters, including spring stiffness, were carefully designed to achieve desired dynamic behaviors. With 8 degrees of freedom, it was developed to demonstrate that very simple control strategies can lead to jumping by exciting resonant motions of the mechanical system. Whitebert laid the groundwork for the Bert family by proving that resonance-based movement is possible.
Further reading:
Dominic Lakatos, Kai Ploeger, Florian Loeffl, Daniel Seidel, Florian Schmidt, Thomas Gumpert, et al., "Dynamic Locomotion Gaits of a Compliantly Actuated Quadruped With SLIP-Like Articulated Legs Embodied in the Mechanical Design", IEEE Robotics and Automation Letters, vol. 3, no. 4, pp. 3908–3915, October 2018. [elib]
Greybert is the first major iteration of Whitebert. Its body size was slightly increased to accommodate additional electronics while preserving the original concept of exploiting mechanical resonance. It served as a testbed for extending mode-based control theory and demonstrated that elastic elements can be effectively used to achieve an energy-efficient bounding gait.
Owing to its robustness, Greybert also became a successful platform for reinforcement learning directly on hardware, thereby bypassing sim-to-real challenges. It was the first Bert to operate on the ESA Mars Testbed, where it learned to traverse sandy slopes.
Further reading:
Davide Calzolari, Cosimo Della Santina, and Alin Albu-Schäffer, "Exciting families of passive gaits in an elastic quadruped via natural motion manifold control", The International Journal of Robotics Research, vol. 45, no. 2, pp. 233–258, June 2025. [elib]
Daniel Seidel, Milan Hermann, Thomas Gumpert, Florian C. Loeffl, and Alin Albu-Schäffer, "Using Elastically Actuated Legged Robots in Rough Terrain: Experiments with DLR Quadruped bert", in Proc. of the 2020 IEEE Aerospace Conference, Big Sky, United States, pp. 1–8, March 2020. [elib]
Norbert is a newer iteration of Greybert, maintaining the same overall dimensions while significantly improving design, modularity, and functionality. It was equipped with additional features, including an arm with a gripper and headlights. Norbert was the first quadrupedal robot to be commanded from space during the ISS demonstration mission Surface Avatar. It implements an algorithm that enables online relearning on the hardware, and its size and the robustness of the springs make it ideal for exploring tight openings, such as caves.
Daniel Seidel, Annika Schmidt, Xiaozhou Luo, Antonin Raffin, Luisa Mayershofer, Tristan Ehlert, et al., "Toward Space Exploration on Legs: ISS-to-Earth Teleoperation Experiments with a Quadruped Robot", in Proc. of the 2024 IEEE Conference on Telepresence (Telepresence 2024), Pasadena, USA, pp. 10–15, November 2024. [elib]
Daniel Seidel, Annika Schmidt, Antonin Raffin, Xiaozhou Luo, Tristan Hagen Ehlert, Linus Hörndler, et al., "Promises and Challenges of Robotic Quadrupeds for Space Exploration", in Proceedings of the International Astronautical Congress (IAC), Sydney, Australia, September 2025. [elib]
Herbert is a replica of Norbert, built to support daily research activities. It provides an additional experimental platform for researchers and ensures availability for demo events. Due to its friendly appearance and expressive gaits, it is especially popular with kids and helps to give them first hands-on experiences with robotics.
Ebert is a divergence from the previous Bert designs. Unlike its siblings, it features 12 degrees of freedom, as an additional shoulder joint per leg was added. This allows for more diverse oscillations of the mechanical system. Ebert was designed to be particularly soft and compliant, enabling large-amplitude resonant motions that can develop into multiple locomotion gaits inspired by biological systems.
Calzolari, Davide, Santina, Cosimo Della, Giordano, Alessandro M., and Albu-Schäffer, Alin, "Single-Leg Forward Hopping via Nonlinear Modes", in Proc. of the 2022 American Control Conference (ACC), Atlanta, USA, pp. 506–513, May 2022
Calzolari, Davide, Santina, Cosimo Della, Giordano, Alessandro M., Schmidt, Annika, and Albu-Schäffer, Alin,"Embodying Quasi-Passive Modal Trotting and Pronking in a Sagittal Elastic Quadruped", IEEE Robotics and Automation Letters, vol. 8, no. 4, pp. 2285–2292, April 2023. [elib]
Technical data*
Size:
0,40 m × 0,30 m × 0,25 m
Weight:
3 kg
Degrees of freedom:
8
Speed:
approx. 0.8 km/h
Power supply:
Wired or battery operated
Drives:
SEA with non-ferrous DC motors
Sensors:
16 position sensors (two each per joint, before and after the springs)
Inertial sensor system
Special features:
Series elastic actuators
Functional coupling of the joints via synchronous belt drives
* The technical data varies between the individual versions.
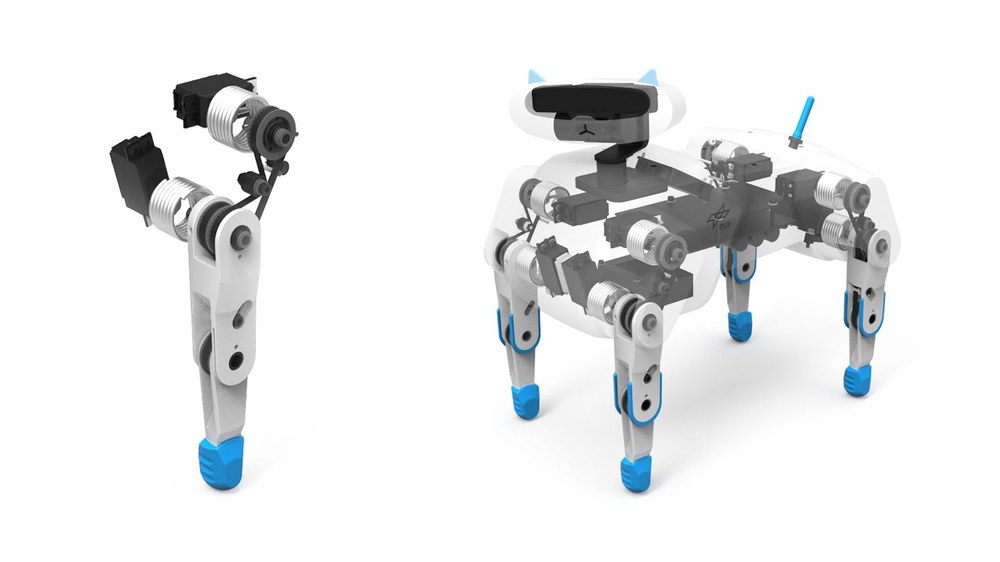
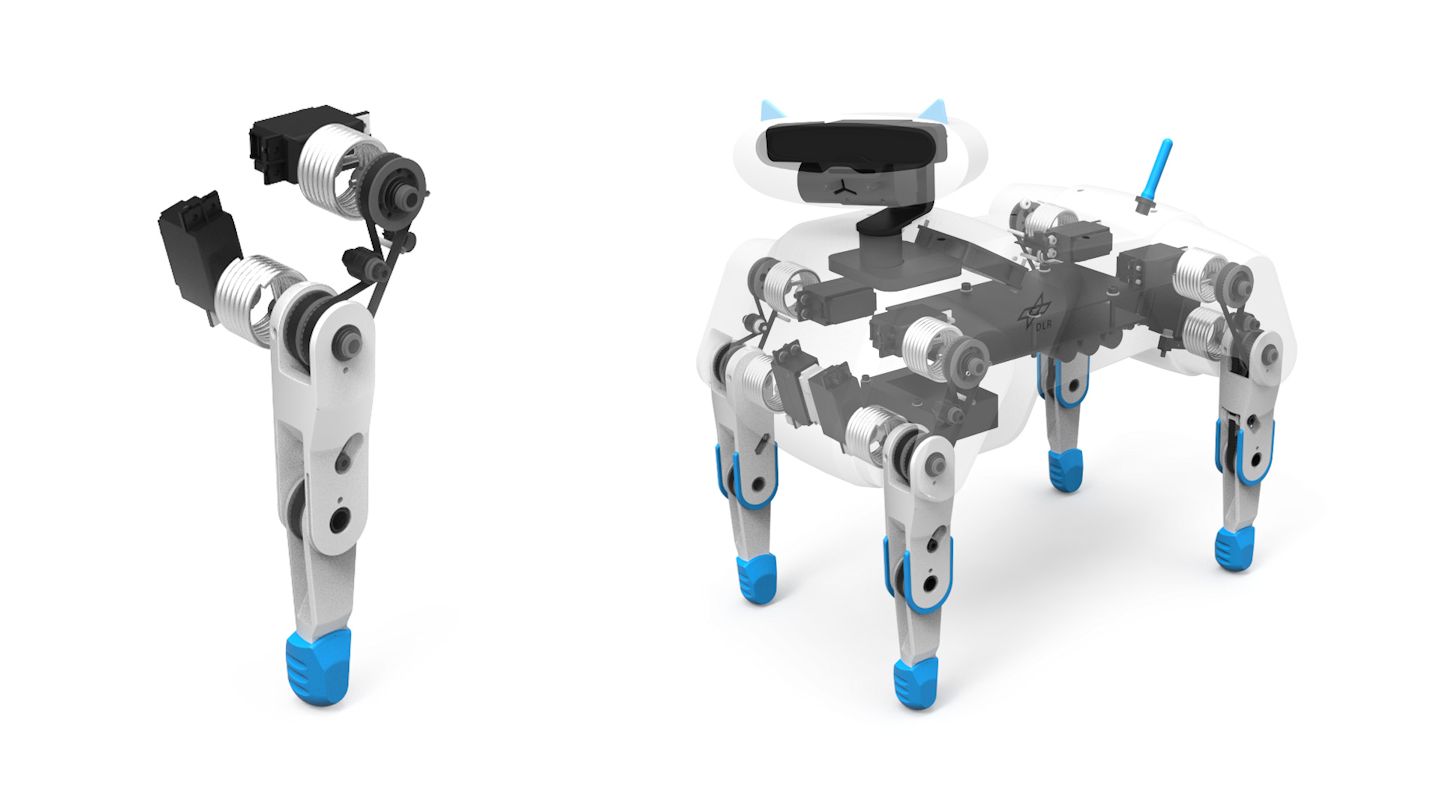
Whitebert CAD illustration
Left: Drive concept with motors, springs and synchronous coupling belts shown on one leg Right: Overall integration of all legs and drive units in Bert's body











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}