Berts sind eine Familie von elastischen Vierbeinern, die ursprünglich entwickelt wurden, um die Ausnutzung der Eigenschwingungen mechanischer Systeme zu untersuchen. Ziel ist es, eine energieeffiziente Fortbewegung zu entwickeln, die für die Erforschung des Weltraums entscheidend ist, wo die Lebensdauer der Batterien begrenzt ist. Das Konzept folgt einer Rapid-Prototyping-Philosophie, die zu mehreren Generationen mit zunehmender Leistungsfähigkeit und Robustheit führt. Dank ihres nachgiebigen Designs und ihrer leichten Bauweise ermöglichen die Berts die direkte Anwendung von Verstärkungslernen auf der Hardware, wodurch Probleme bei der Übertragung von der Simulation in die Realität vermieden werden. Durch ihre federnde Bewegung und ihr ansprechendes Äußeres sind die Berts für Kinder und Erwachsene gleichermaßen interessant.
Das Bert-System wurde 2017 zum ersten Mal der Öffentlichkeit vorgestellt.
Whitebert ist die ursprüngliche Bert-Plattform. Seine mechanischen Parameter, einschließlich der Federsteifigkeit, wurden sorgfältig entwickelt, um das gewünschte dynamische Verhalten zu erreichen. Mit 8 Freiheitsgraden wurde sie entwickelt, um zu zeigen, dass sehr einfache Kontrollstrategien zu Sprüngen führen können, indem sie Resonanzbewegungen des mechanischen Systems anregen. Whitebert legte den Grundstein für die Bert-Familie, indem er bewies, dass eine resonanzbasierte Bewegung möglich ist.
Weitere Informationen:
Dominic Lakatos, Kai Ploeger, Florian Loeffl, Daniel Seidel, Florian Schmidt, Thomas Gumpert, et al., "Dynamic Locomotion Gaits of a Compliantly Actuated Quadruped With SLIP-Like Articulated Legs Embodied in the Mechanical Design", IEEE Robotics and Automation Letters, vol. 3, no. 4, pp. 3908–3915, October 2018. [elib]
Greybert ist die erste große Iteration von Whitebert. Sein Körper wurde leicht vergrößert, um zusätzliche Elektronik unterzubringen, wobei das ursprüngliche Konzept der Ausnutzung mechanischer Resonanz beibehalten wurde. Er diente als Testobjekt für die Erweiterung der modusbasierten Steuerungstheorie und zeigte, dass elastische Elemente effektiv genutzt werden können, um einen energieeffizienten, begrenzten Gang zu erreichen.
Aufgrund seiner Robustheit wurde Greybert auch zu einer erfolgreichen Plattform für das Verstärkungslernen direkt auf der Hardware und umging damit die Herausforderungen von Simulation zu Realität. Greybert war der erste Bert, der auf dem ESA Mars Testbed operierte, wo er lernte, sandige Hänge zu überqueren.
Weitere Lektüre:
Davide Calzolari, Cosimo Della Santina, and Alin Albu-Schäffer, "Exciting families of passive gaits in an elastic quadruped via natural motion manifold control", The International Journal of Robotics Research, vol. 45, no. 2, pp. 233–258, June 2025. [elib]
Daniel Seidel, Milan Hermann, Thomas Gumpert, Florian C. Loeffl, and Alin Albu-Schäffer, "Using Elastically Actuated Legged Robots in Rough Terrain: Experiments with DLR Quadruped bert", in Proc. of the 2020 IEEE Aerospace Conference, Big Sky, United States, pp. 1–8, March 2020. [elib]
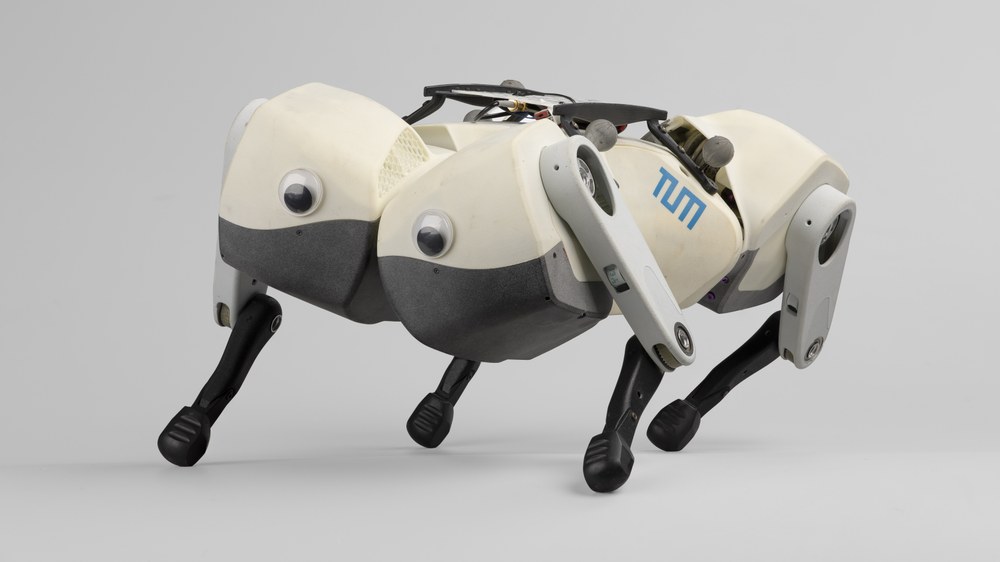
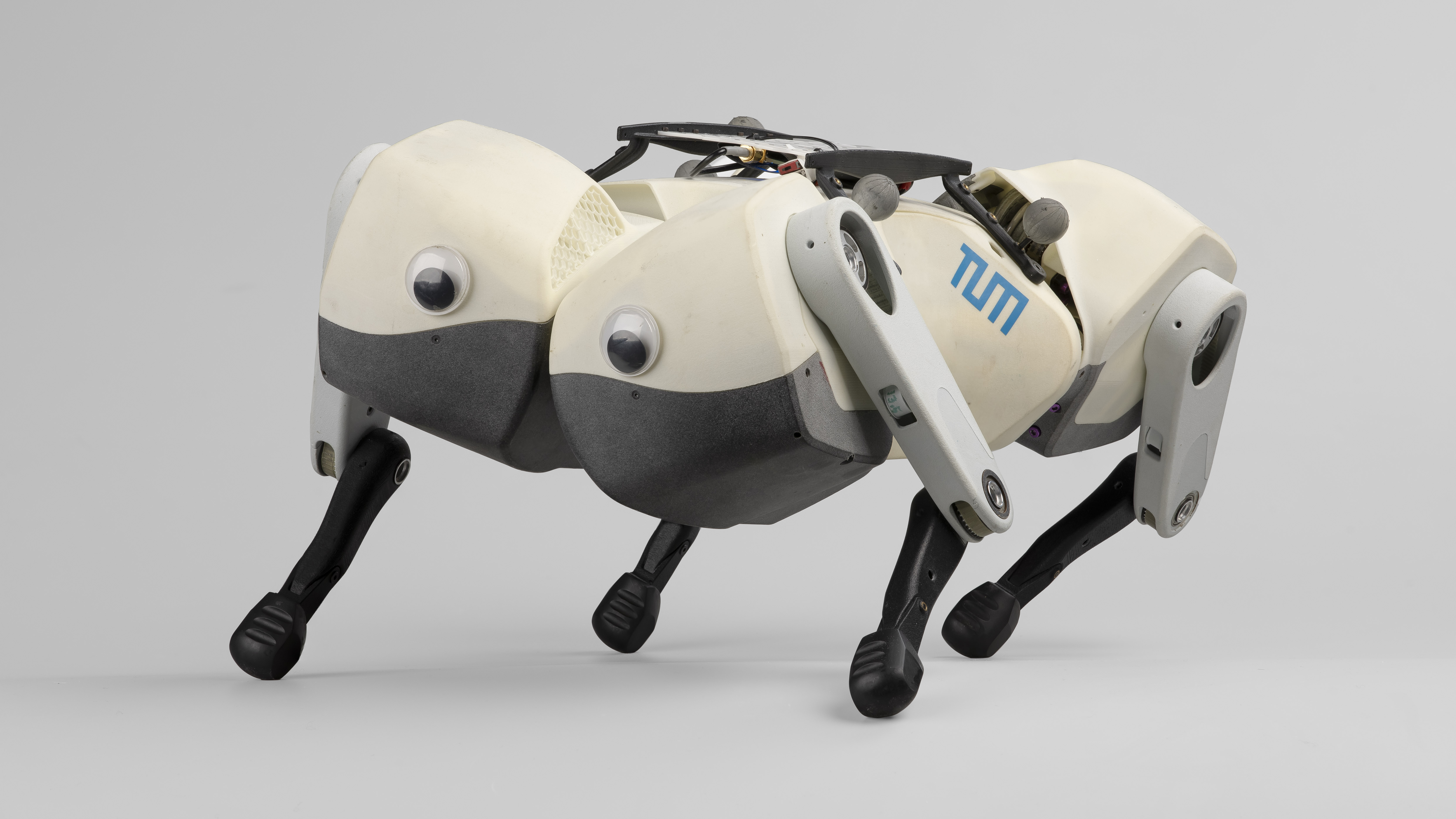
Norbert ist eine neuere Iteration von Greybert, die die gleichen Gesamtabmessungen beibehält, aber das Design, die Modularität und die Funktionalität deutlich verbessert. Er wurde mit zusätzlichen Funktionen ausgestattet, darunter ein Arm mit einem Greifer und Scheinwerfern. Norbert war der erste vierbeinige Roboter, der während der ISS-Demonstrationsmission Surface Avatar vom Weltraum aus kommandiert wurde. Er implementiert einen Algorithmus, der Online-Neulernen auf der Hardware ermöglicht. Seine Größe und die Robustheit der Federn machen ihn ideal für die Erkundung enger Öffnungen, wie z.B. Höhlen.
Daniel Seidel, Annika Schmidt, Xiaozhou Luo, Antonin Raffin, Luisa Mayershofer, Tristan Ehlert, et al., "Toward Space Exploration on Legs: ISS-to-Earth Teleoperation Experiments with a Quadruped Robot", in Proc. of the 2024 IEEE Conference on Telepresence (Telepresence 2024), Pasadena, USA, pp. 10–15, November 2024. [elib]
Daniel Seidel, Annika Schmidt, Antonin Raffin, Xiaozhou Luo, Tristan Hagen Ehlert, Linus Hörndler, et al., "Promises and Challenges of Robotic Quadrupeds for Space Exploration", in Proceedings of the International Astronautical Congress (IAC), Sydney, Australia, September 2025. [elib]
Herbert ist eine Nachbildung von Norbert, die zur Unterstützung der täglichen Forschungsaktivitäten gebaut wurde. Er bietet eine zusätzliche Experimentierplattform für Forscher und gewährleistet die Verfügbarkeit für Demo-Veranstaltungen. Aufgrund seines freundlichen Aussehens und seiner ausdrucksstarken Gangart ist er besonders bei Kindern beliebt und hilft ihnen, erste praktische Erfahrungen mit der Robotik zu machen.
Ebert ist eine Abweichung von den vorherigen Bert-Designs. Anders als seine Geschwister verfügt er über 12 Freiheitsgrade, da ein zusätzliches Schultergelenk pro Bein hinzugefügt wurde. Dies ermöglicht vielfältigere Schwingungen des mechanischen Systems. Ebert wurde so konzipiert, dass er besonders weich und nachgiebig ist, um Resonanzbewegungen mit großen Amplituden zu ermöglichen, die sich zu verschiedenen, von biologischen Systemen inspirierten Fortbewegungsarten entwickeln können.
Calzolari, Davide, Santina, Cosimo Della, Giordano, Alessandro M., and Albu-Schäffer, Alin, "Single-Leg Forward Hopping via Nonlinear Modes", in Proc. of the 2022 American Control Conference (ACC), Atlanta, USA, pp. 506–513, May 2022
Calzolari, Davide, Santina, Cosimo Della, Giordano, Alessandro M., Schmidt, Annika, and Albu-Schäffer, Alin,"Embodying Quasi-Passive Modal Trotting and Pronking in a Sagittal Elastic Quadruped", IEEE Robotics and Automation Letters, vol. 8, no. 4, pp. 2285–2292, April 2023. [elib]
Technische Daten*
Größe:
0,40 m × 0,30 m × 0,25 m
Gewicht:
3 kg
Grade der Freiheit:
8
Geschwindigkeit:
ca. 0,8 km/h
Stromversorgung:
Kabel- oder batteriebetrieben
Laufwerke:
SEA mit Nichteisen-Gleichstrommotoren
Sensoren:
16 Positionssensoren (je zwei pro Gelenk, vor und nach den Federn)
Inertiales Sensorsystem
Besonderheiten:
Serie elastischer Aktuatoren
Funktionelle Kopplung der Gelenke über Zahnriemenantriebe
* Die technischen Daten variieren zwischen den einzelnen Versionen.
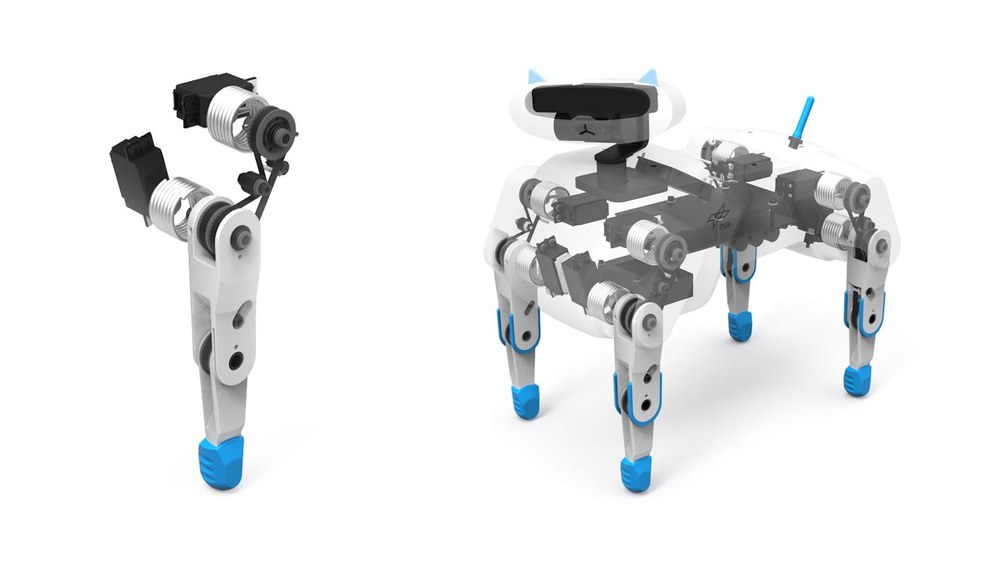
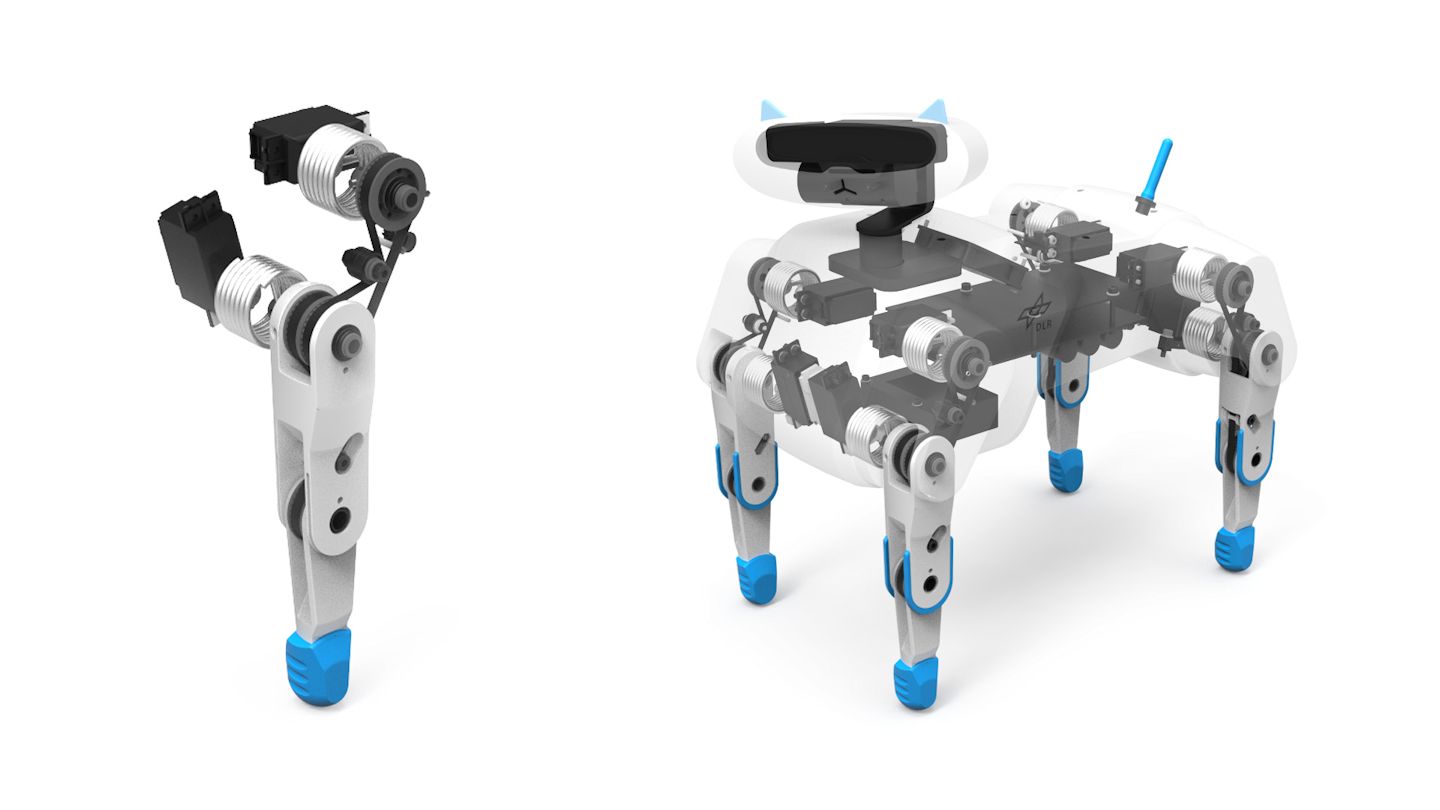
Whitebert CAD Illustration
Links: Antriebskonzept mit Motoren, Federn und Synchronkupplungsriemen, dargestellt an einem Bein Rechts: Gesamtintegration aller Beine und Antriebseinheiten in Berts Körper











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}