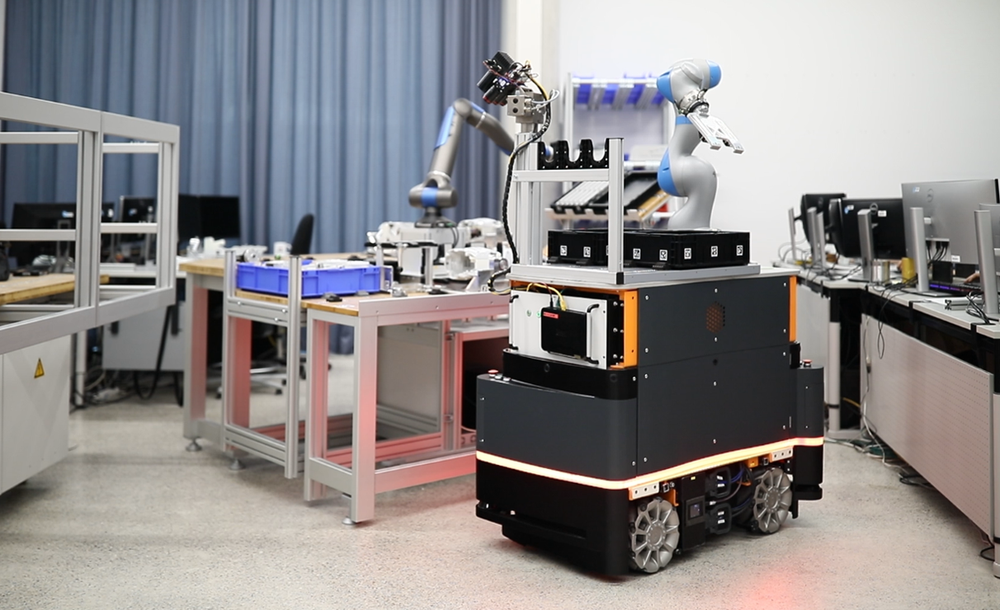
The AIMM (Autonomous Intelligent Mobile Manipulator) robot is a research prototype, developed at the German Aerospace Center's Robotics Institute. The mobile manipulator boasts an integrated, onboard software stack for autonomous operation, covering perception, reasoning, and manipulation. AIMM excels in laboratory automation and future manufacturing scenarios, with a particular strength in handling and manipulating articulated objects, like lab devices.
Technical Data
Size:
110cm x 61cm x 225cm
Weight:
approx. 450kg
Degrees of freedom:
13
Sensors:
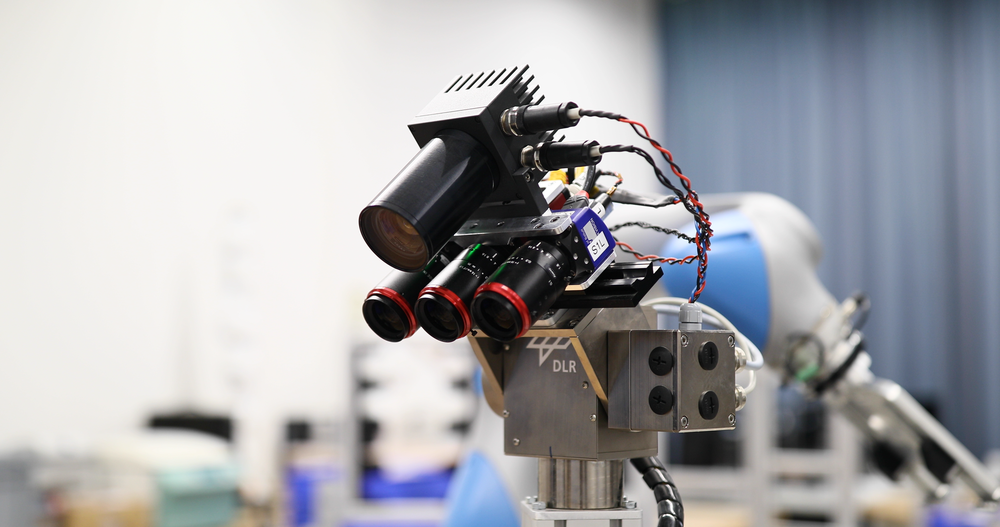
• 2 Sick S300 laser scanners • stereo camera RC Viscore • color camera
Speed:
1–1,5m/s
Workspace:
up to 2m height
Features:
• mobile platform with a manipulator • pan-tilt-unit with stereo camera and pattern projector • flexibility by a tool changer • sutonomous operation
System Description
Embedded within the Future Manufacturing domain at DLR, AIMM targets applications where autonomous mobile manipulation is the key to success. With its mobile platform and integrated manipulator, AIMM has been enhanced with a tool changer, pan-tilt unit, and multiple sensors, enabling seamless perception of the environment and objects to be manipulated. This versatility allows AIMM to switch between different tasks, eliminating the need for dedicated robots that may prove cost-ineffective. As a result, AIMM unlocks new application possibilities while simultaneously addressing the technological challenges inherent in such a complex system. Operating in partially unknown environments and responding to task variations, AIMM embraces a high level of autonomy to find its way in new environments and actively support users in implementing novel tasks. Research efforts centered around perception, reasoning, and manipulation drive AIMM towards its ultimate goal: a fully autonomous robotic system. All the while, AIMM remains intuitive to operate, ensuring that flexibility and frequent task programming are easily accommodated.
AIMM's adaptability is on full display across various research projects. Within the European Robotics Challenges EuRoC, five challenger teams from all over Europe were the AIMM base system to carry out various tasks ranging from robot-human logistics for aircraft assembly to maintenance operations in hazardous environments and automotive logistics at a car assembly line. In HGF CoViPa and HGF ALARO, the robot excels in lab automation tasks, aiding in biomarker assays and hospital laboratory workflows. Meanwhile, in the National funded ROX project, AIMM showcases its potential for future manufacturing, pursuing material handling with agility and precision in unstructured industrial and logistical environments.
Selected Publications
Dömel, Andreas, Simon Kriegel, Michael Kaßecker, Manuel Brucker, Tim Bodenmüller, and Michael Suppa. "Toward fully autonomous mobile manipulation for industrial environments." International Journal of Advanced Robotic Systems 14, no. 4 (2017).
Lehner, Peter, and Alin Albu-Schäffer. "The repetition roadmap for repetitive constrained motion planning." IEEE Robotics and Automation Letters 3.4 (2018): 3884-3891.
Sakagami, Ryo, Andreas Dömel, Peter Lehner, Sebastian Riedel, Sebastian G. Brunner, Alin Albu-Schäffer, and Freek Stulp. "A Tree-Based World Model for Reducing System Complexity in Autonomous Mobile Manipulation." IEEE Robotics and Automation Letters (2024).




{kind=link}
{kind=link}
{kind=link}
{kind=link}