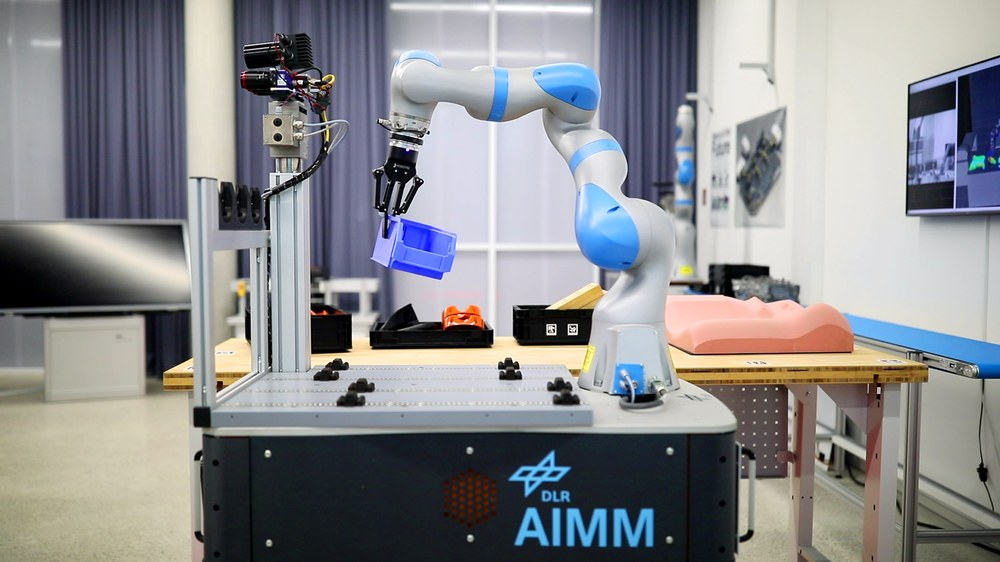
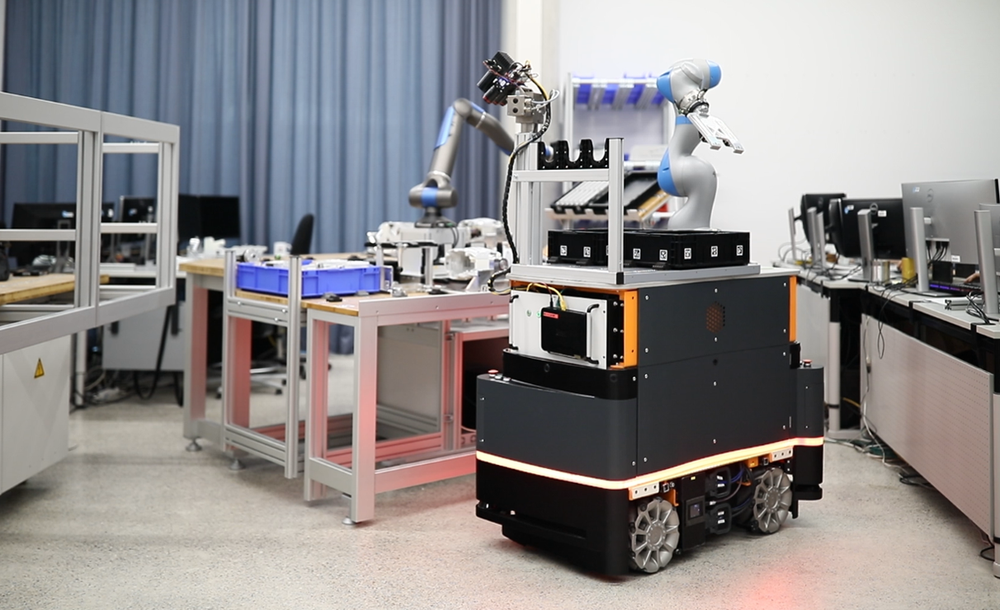
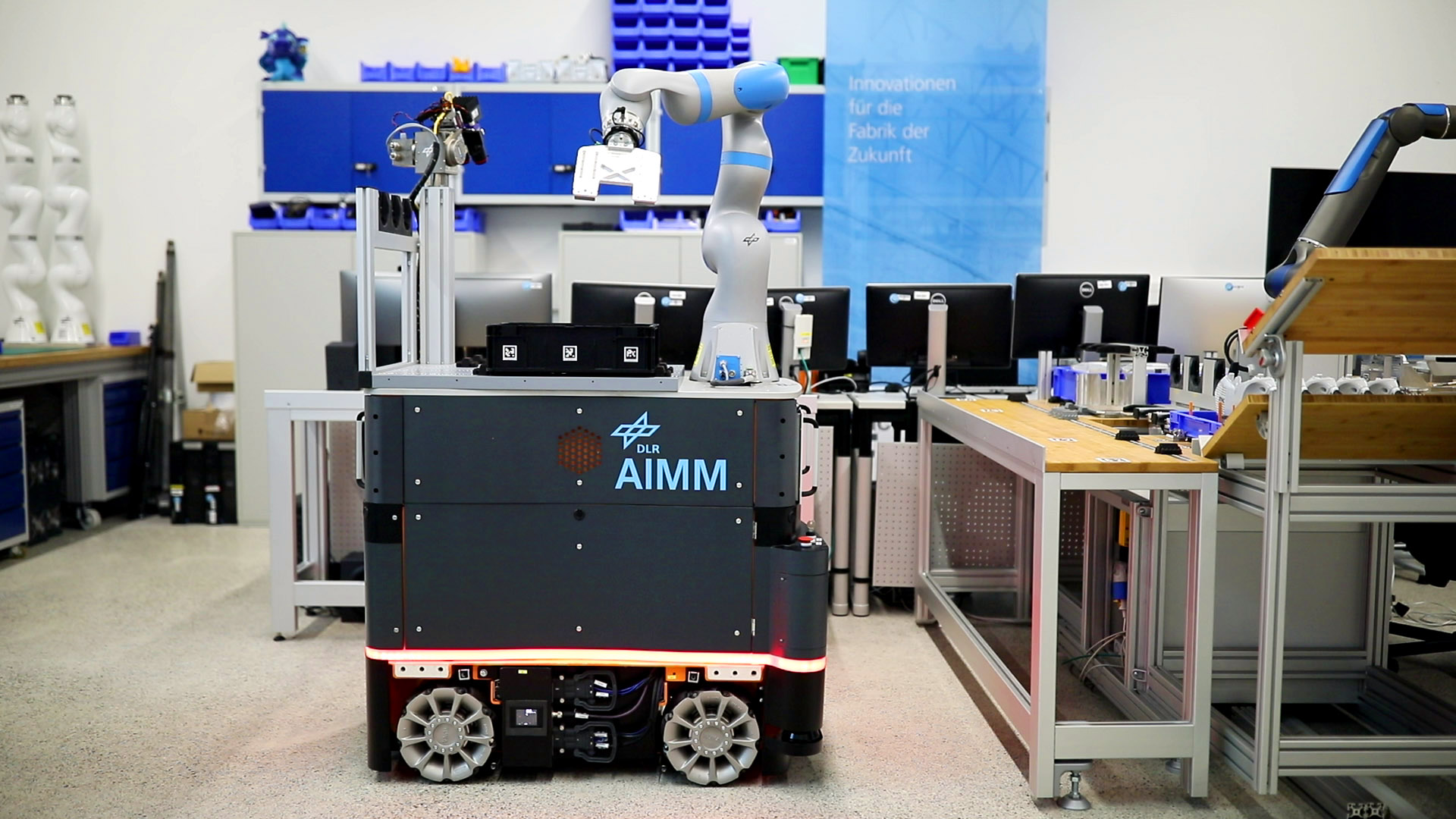
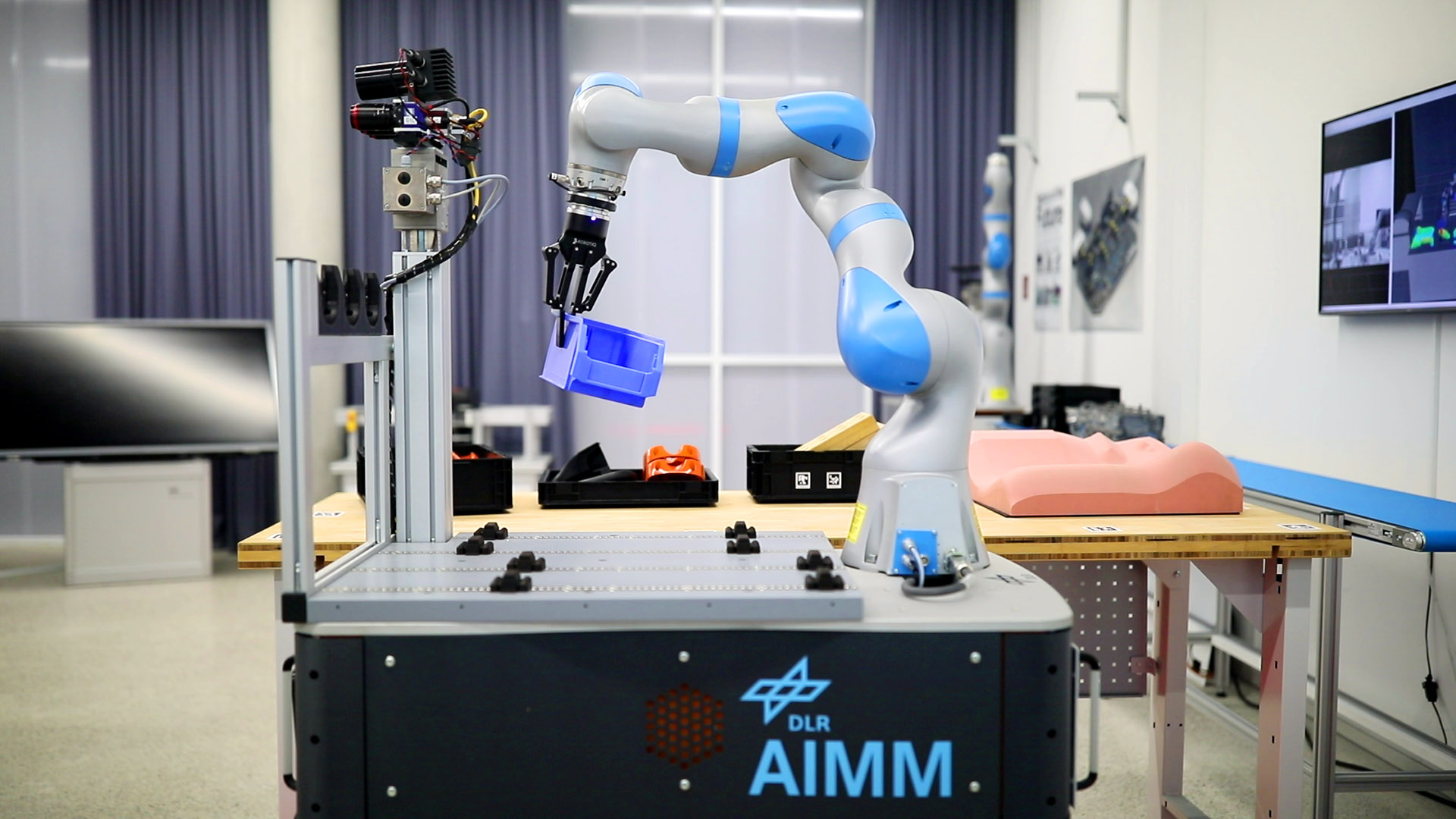
Der Roboter AIMM (Autonomer Intelligenter Mobiler Manipulator) ist ein Forschungsprototyp, der am Institut für Robotik des Deutschen Zentrums für Luft- und Raumfahrt entwickelt wird. Der mobile Manipulator verfügt über einen integrierten Software-Stack für den autonomen Betrieb, welcher Wahrnehmung, logisches Denken und Manipulation integriert. AIMM eignet sich hervorragend für die Laborautomatisierung und künftige Produktionsszenarien. Sein Fokus liegt in der Handhabung und Manipulation von artikulierten Objekten, wie z.B. Laborgeräten.
Technische Daten
Größe:
110 cm x 61 cm x 225 cm
Gewicht:
ca. 450 kg
Freiheitsgrade:
13
Sensorik:
2 Sick S300 Laserscanner
1 Stereo-Kamera RC Viscore
1 Farb-Kamera
Geschwindigkeit:
1–1,5 m/s
Arbeitsraum:
bis zu einer Höhe von 2 m
Besonderheiten:
Mobile Plattform mit Manipulator
Pan-Tilt-Einheit mit Stereo-Kamera und Projektor
Flexibilität durch Werkzeug-Wechsler
Autonome Operation
Systembeschreibung
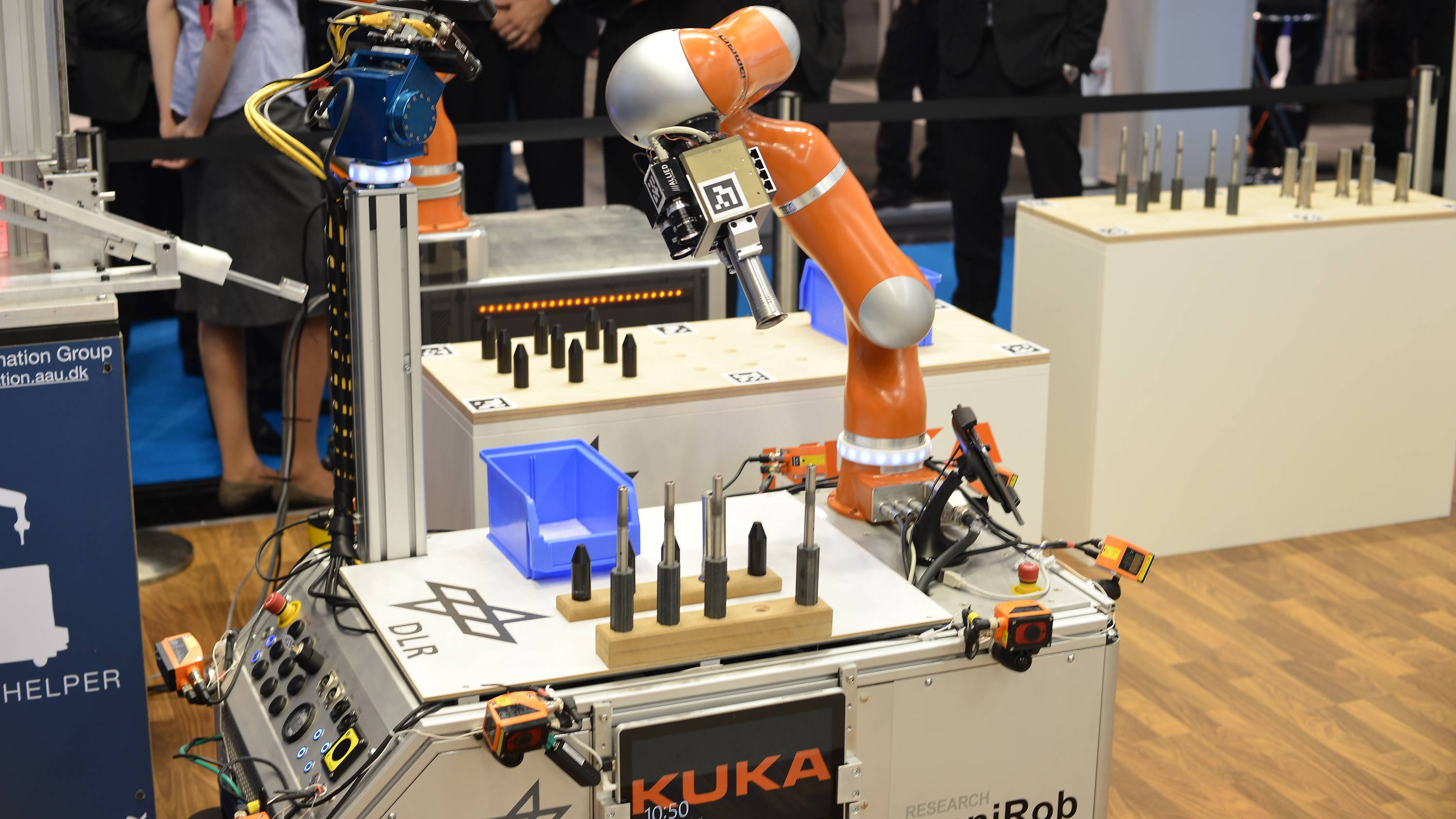
Als Teil des Future Manufacturing des DLR, zielt AIMM auf Anwendungen ab, bei denen autonome mobile Manipulation der Schlüssel zum Erfolg ist. Mit seiner mobilen Plattform und seinem integrierten Manipulator wurde AIMM um einen Werkzeugwechsler, eine Schwenk-Neige-Einheit und mehrere Sensoren erweitert, die eine nahtlose Wahrnehmung der Umgebung und der zu manipulierenden Objekte ermöglichen. Dank dieser Vielseitigkeit kann AIMM zwischen verschiedenen Aufgaben wechseln, wodurch der Bedarf an speziellen Robotern für einzelne Aufgabe entfällt. Damit eröffnet AIMM neue Anwendungsmöglichkeiten und bewältigt gleichzeitig technologischen Herausforderungen, die mit einem komplexen System verbunden sind: AIMM operiert in teilweise unbekannten Umgebungen und kann Änderungen in der Aufgabe erkennen und darauf reagieren. Der Roboter verfügt über ein hohes Maß an Autonomie, um sich in neuen Umgebungen zurechtzufinden und den Benutzer aktiv bei der Durchführung neuer Aufgaben zu unterstützen. Fortschritte in der Forschung für Wahrnehmung, Logik und Manipulation, treiben die Vision von AIMM voran: ein vollständig autonomes Robotersystem. Dabei bleibt AIMM intuitiv bedienbar, so dass Flexibilität und Aufgabenadaption problemlos möglich sind.
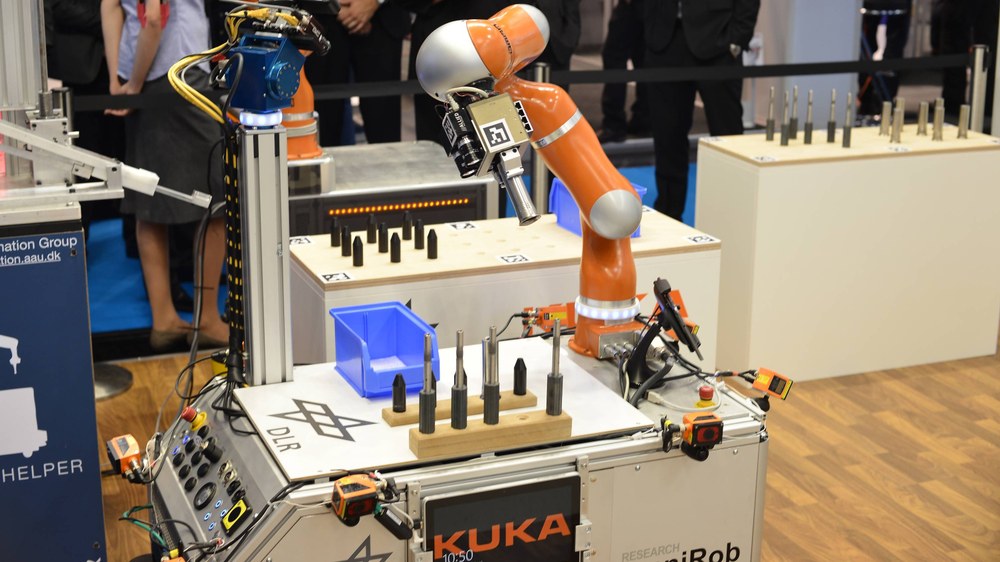
Die Anpassungsfähigkeit von AIMM kommt in verschiedenen Forschungsprojekten zur Geltung. Im Rahmen der European Robotics Challenges (EuRoC) haben fünf Challenger-Teams aus ganz Europa das AIMM-Basissystem für verschiedene Aufgaben eingesetzt, die von der Flugzeugmontage über Wartungsarbeiten in gefährlichen Umgebungen bis hin zum Fließband in der Automobilindustrie reichten. In den Projekten HGF CoViPa und HGF ALARO erschließt der Roboter neue Einsatzgebiete in der Laborautomatisierung und hilft bei Biomarker-Assays und den Arbeitsabläufen in Krankenhäusern. Im Rahmen des national geförderten ROX-Projekts zeigt AIMM sein Potenzial für Future Manufacturing, und übernimmt die präzise Materialhandhabung in unstrukturierten industriellen Umgebungen.
Ausgewählte Veröffentlichungen
[1] Dömel, Andreas, Simon Kriegel, Michael Kaßecker, Manuel Brucker, Tim Bodenmüller, and Michael Suppa. "Toward fully autonomous mobile manipulation for industrial environments." International Journal of Advanced Robotic Systems 14, no. 4 (2017).
[2] Lehner, Peter, and Alin Albu-Schäffer. "The repetition roadmap for repetitive constrained motion planning." IEEE Robotics and Automation Letters 3.4 (2018): 3884-3891.
[3] Sakagami, Ryo, Andreas Dömel, Peter Lehner, Sebastian Riedel, Sebastian G. Brunner, Alin Albu-Schäffer, and Freek Stulp. "A Tree-Based World Model for Reducing System Complexity in Autonomous Mobile Manipulation." IEEE Robotics and Automation Letters (2024).



{kind=link}
{kind=link}
{kind=link}
{kind=link}